Meranie sily so snímačom sily v mostíkovom zapojení (digitálna váha)
16 januára, 2024 | Posted by in Hlavná stránka| STREDNÁ PRIEMYSELNÁ ŠKOLA J. MURGAŠA BANSKÁ BYSTRICA Elektrotechnické laboratóriá | ||||||||||||||
| Odbor: | Dátum merania: | |||||||||||||
| Trieda: | Dátum odovzdania: | |||||||||||||
| Skupina: | Vyučujúci: doc.RNDr.Juraj Pančík, CSc. | |||||||||||||
| Laboratórium: | Klasifikácia: | Známka: | Podpis: | |||||||||||
| Meno a priezvisko žiaka: | ||||||||||||||
| LABORATÓRNE CVIČENIE č. 33 Meranie sily so snímačom sily v mostíkovom zapojení (digitálna váha) | ||||||||||||||
| OBSAH: | ||||||||||||||
| 1. Názov cvičenia a jednotlivých úloh. | ||||||||||||||
| 2. Súpis prístrojov a pomôcok pri meraní. | ||||||||||||||
| 3. Popis meracej metódy a schéma merania. | ||||||||||||||
| 4. Tabuľky a grafy nameraných a vypočítaných hodnôt. | ||||||||||||||
| 5. Vyhodnotenie merania. | ||||||||||||||
| 1. NÁZOV CVIČENIA: | Meranie sily so snímačom sily v mostíkovom zapojení (digitálna váha) | |||||||||||||
| Úlohy a) | Oboznámte sa s hardvérovým a softvérovým riešenia meracieho prípravku | |||||||||||||
| b) | Vykonajte merania hmotnosti pri rôznych hodnotách referenčných závaží pre mechaniku digitálnej váhy, ktorá používa odporové snímače sily v mostíkovom zapojení. Použite referenčnú digitálnu váhu. | |||||||||||||
| c) | Kalibračným stanovte počiatočný offset „Offset“ [ADU] a prevodovú konštantu digitálnej váhy vyjadrenú v jednotkách [ADU/g] | |||||||||||||
| d) | Vyjadrite linearitu modelu prevodovej charakteristiky digitálnej váhy (závislosť výstupnej veličiny signálu zo snímača sily [ADU] na vstupnej veličine (hmotnosť, [g] ) ) | |||||||||||||
| e) | ||||||||||||||
| 2.SÚPIS POUŽITÝCH PRÍSTROJOV | ||||||||||||||
| Prístroj – pomôcka | Typové označenie a rozsah | Výrobca | Inventárne číslo | |||||||||||
| 1. | MP c.33 Merací prípravok pre meranie sily (digitálna váha) | |||||||||||||
| 2. | Kuchynská digitálna váha (max.5 kg, presnosť ±1g) | |||||||||||||
| 3. | Sada závaží z laboratória fyziky | |||||||||||||
| Nedostatky pri hodnotení (zapíše vedúci merania učiteľ): | ||||||||||||||
3. Popis meracej metódy a schéma merania
Princíp merania sily. Ak sa pás vodivého kovu natiahne, stane sa tenším a dlhším, pričom obe zmeny vedú k zvýšeniu elektrického odporu od konca ku koncu. Naopak, ak sa pás vodivého kovu vystaví tlakovej sile (bez vybočenia), rozšíri sa a skráti. Ak sa tieto napätia udržiavajú v medziach pružnosti kovového pásika (aby sa pásik trvalo nedeformoval), pásik sa môže použiť ako merací prvok fyzikálnej sily, pričom veľkosť pôsobiacej sily sa odvodí z merania jeho odporu. Takéto zariadenie sa nazýva tenzometer. Tenzometre sa často používajú v strojárskom výskume a vývoji na meranie napätí, ktoré vznikajú v strojových zariadeniach. Jednou z oblastí použitia je testovanie komponentov lietadiel, kde sa na meranie napätia používajú malé tenzometrické pásy prilepené na konštrukčné prvky, spojovacie zariadenia a akékoľvek iné kritické komponenty draku lietadla. Väčšina tenzometrov je menšia ako poštová známka a vyzerá približne ako na obrázku Obrázok 1.
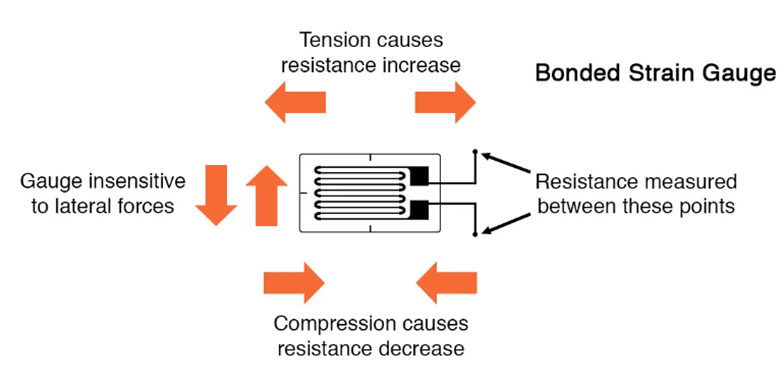
Obrázok 1 Principiálna schéma snímača sily – tenzometra [1]
Odolnosť tenzometra. Typické odpory tenzometrov sa pohybujú od 30 Ω do 3 kΩ (bez napätia). Tento odpor sa môže zmeniť len o zlomok percenta pre celý rozsah sily meradla vzhľadom na obmedzenia vyplývajúce z elastických limitov materiálu meradla a skúšobnej vzorky. Sily dostatočne veľké na vyvolanie väčších zmien odporu by trvalo deformovali skúšobnú vzorku a/alebo samotné vodiče meradla, čím by sa meradlo ako meracie zariadenie zničilo. Preto, aby sme mohli tenzometer používať ako praktický prístroj, musíme merať veľmi malé zmeny odporu s vysokou presnosťou.
Mostíkový merací obvod
Takáto vysoká presnosť si vyžaduje mostíkový merací obvod. Na rozdiel od Wheatstonovho mostíka, ktorý využíva detektor nulovej rovnováhy a ľudskú obsluhu na udržiavanie rovnovážneho stavu, obvod tenzometrického mostíka indikuje meranú deformáciu stupňom nerovnováhy a na presné meranie tejto nerovnováhy využíva presný voltmeter v strede mostíka, viď. Obrázok 2
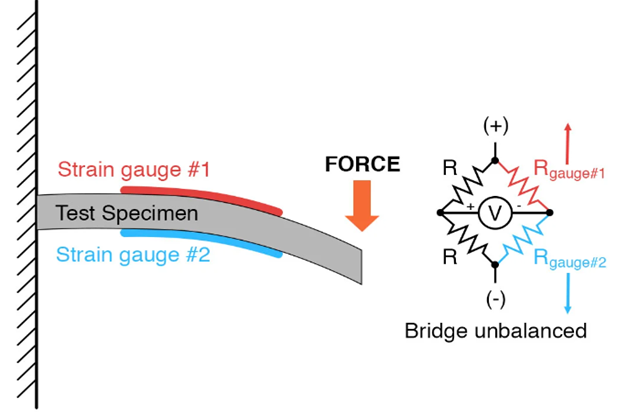
Obrázok 2 Rozváženie tzv. „half bridge“ tenzometra pod vplyvom záťaže (váženej hmotnosti v prípade digitálnych váh) [1]
Meracia metóda
Nami použitá meracia metóda vychádza z konštrukcie digitálnej váhy kde sa použil tzv „full bridge“ t.j. štvorica tenzometrov, viď. Obrázok 3.
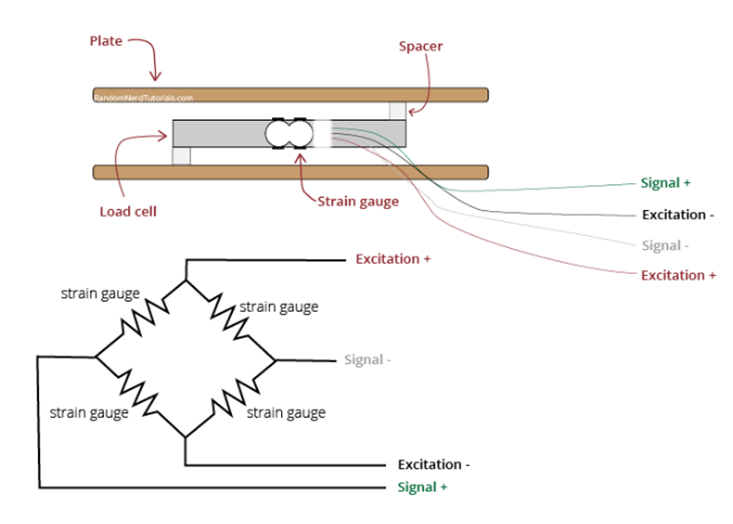
Obrázok 3 Mechanika digitálnej váhy a lokalizácia tenzometrov na hliníkovom nosníku s dvoma veľkými otvormi [2].
Merací systém
Merací systém pozostáva okrem spomínaných mechanických častí digitálnej váhy (hliníkový bloček s nalepenými tenzometrami v konfigurácii „full bridge“, polykarbonátové platne (horná a dolná)). Ďalším prvkom je zákaznícky obvod HX711 spoločnosti Avia [3], ktorý slúži ako „front end“ obvod, programovateľný zosilňovač, 24 bitový Sigma Delta ADC (analógovo digitálny prevodník) a komunikačno sériový interface (rozhranie) pre vyhodnocovací jednodoskový počítač typu ARDUINo UNO Rev.3, viď. Obrázok 4. Program v ARDUINO zabezpečil výpis získaných digitálnych údajov z HX711 tzv. 24 bit RAW dát (v jednotkách ADU) na sériovú linku čítanú terminálovým programom v počítači. Program v ARDUINO dokázal vypočítať priemer z 10 hodnôt.
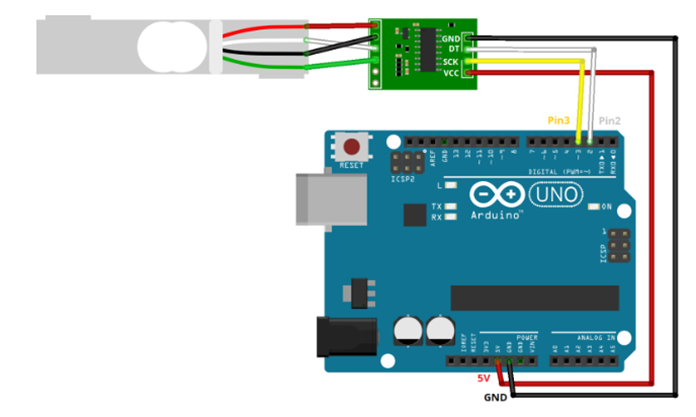
Obrázok 4 Bloková schéma meracieho systému na meranie sily v zostave digitálnej váhy [2]
4. Tabuľky a grafy nameraných a vypočítaných hodnôt.
Najprv sme vykonali merania hmotnosti pri rôznych hodnotách referenčných závaží pre mechaniku digitálnej váhy, ktorá používa odporové snímače sily v mostíkovom zapojení. Použili sme referenčnú kuchynskú digitálnu váhu a zistili sme maximálne 1g odchýlku od deklarovaných hmotností použitých závaží. Vstupná tabuľka č.1 prezentuje výsledky váženia pre jednotlivé hmotnosti kalibračných závaží (viď. stĺpec „Hmotnosť kalibračných závaží [g]“ ). V stĺpci „Signál z ADC [ADU]“ sú zaznamenané údaje z 24 bit Sigma delta ADC. Následne po tomto meraní sme vykonali kalibráciu digitálnej váhy. Kalibračným postupom sme stanovili počiatočný offset „Offset“ [ADU] (hodnota 153 647 ADU) a stanovili sme prevodovú konštantu digitálnej váhy (= 757 [ADU/g]) vyjadrenú v jednotkách [ADU/g] nasledovným výpočtom :
Kalibračný faktor [ADU/g] =
(Signál z ADC [ADU] pre 100 g závažie – OFFSET [ADU]) / 100 g (referenčná záťaž) (1)
Tabuľka 1 Výsledky váženia pre jednotlivé hmotnosti kalibračných závaží
| n | Hmotnosť kalibračných závaží [g] | Signál z ADC [ADU] | Kalibračný faktor [ADU/g] |
| 1 | 0 | 153647 | |
| 2 | 100 | 229330 | 757 |
| 3 | 200 | 304864 | 755 |
| 4 | 300 | 379454 | 746 |
| 5 | 400 | 454723 | 753 |
| 11 | 970 | 888471 | |
| 12 | 1070 | 964282 | 758 |
| 13 | 1170 | 1039856 | 756 |
| 14 | 1270 | 1114524 | 747 |
| 15 | 1370 | 1189804 | 753 |
Grafom sme vyjadrili sme linearitu modelu prevodovej charakteristiky digitálnej váhy (závislosť výstupnej veličiny signálu zo snímača sily [ADU] na vstupnej veličine (hmotnosť, [g] ) ) – rovnica lineárnej závislosti (y = 756,83x + 153647) bola vypočítaná EXCELOM vrátane linearizačného koeficientu R² = 1. Táto hodnota koeficientu hovorí o vysokom stupni lineárnej odozvy snímačov sily v našej mechanickej zostave digitálnej váhy.
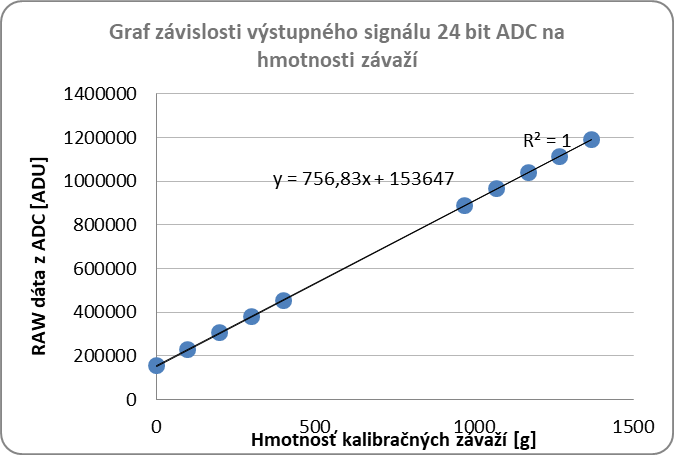
Obrazok 5 Linearitu modelu prevodovej charakteristiky digitálnej váhy
5. Vyhodnotenie merania.
Oboznámili sa s hardvérovým a softvérovým riešením meracieho prípravku – zaregistrovali sme veľký počet digitalizačných úrovní N použitého ADC (N=24) čo zrejme súvisí s potrebou získania vysokého odstupu signál šum v systémovom riešení spracovania signálu z tenzometrov. Vykonali sme merania hmotnosti pri rôznych hodnotách referenčných závaží pre mechaniku digitálnej váhy a pri tomto sme použite referenčnú digitálnu váhu s presnosťou ±1g. Samotné nami použité závažia vykazovali taktiež tento rozptyl hodnôt hmotností ±1g. Kalibračným postupom s hmotnosťou kalibračného závažia 100 g sme stanovili počiatočný offset „Offset“ [ADU] a prevodovú konštantu digitálnej váhy 757 vyjadrenú v jednotkách [ADU/g]. Kalibračné závažie by malo byť na hodnote 80% maximálnej povolenej záťaže hliníkového nosníka (v našom prípade 3kg) t.j. 2,4kg – my sme použili nám dostupné 100g závažie. Pomocou grafu na Obrazok 5 sme vyjadrili linearitu modelu prevodovej charakteristiky digitálnej váhy (závislosť výstupnej veličiny signálu zo snímača sily [ADU] na vstupnej veličine (hmotnosť, [g])) pomocou rovnica lineárnej závislosti (y = 756,83x + 153647) bola vypočítaná EXCELOM vrátane linearizačného koeficientu R² = 1. Táto hodnota koeficientu hovorí o vysokom stupni lineárnej odozvy snímačov sily v našej mechanickej zostave digitálnej váhy.
6. Informačné zdroje
[1] https://www.allaboutcircuits.com/textbook/direct-current/chpt-9/strain-gauges/
[2] https://randomnerdtutorials.com/arduino-load-cell-hx711/#more-110379
[3] https://community.infineon.com/gfawx74859/attachments/gfawx74859/CodeExamples/546/7/HX711_v0_0_B.pdf
You can follow any responses to this entry through the RSS 2.0 Both comments and pings are currently closed.