- Amatersky projekt :
- ARDUINO GEAR SHIFT INDICATOR FINDS ‘EM SO YOU WON’T GRIND ‘EM –> WOKWi simulator project
https://hackaday.com/2024/03/20/arduino-gear-shift-indicator-finds-em-so-you-wont-grind-em/
— indikator radenia manualnej diplomovke s vystupom na graficky displej – HALLOVE senzory nahradene potenciometrami
— vyborne video - Vyznam indikacie spravneho zaradenia rychlosti ci parkovacej brzdy je v bezpecnosti (ASIL = D)
- Riesenie pomocou :
- INFINEON LINK NA PORTAL S INFO :
- https://www.infineon.com/cms/en/product/sensor/magnetic-sensors/magnetic-position-sensors/?redirId=105030
- „3D magentickych snimacov“ INFINEON LINK NA PORTAL S INFO : https://www.infineon.com/cms/en/product/sensor/magnetic-sensors/magnetic-position-sensors/3d-magnetics/#!designsupport
- ARDUINO GEAR SHIFT INDICATOR FINDS ‘EM SO YOU WON’T GRIND ‘EM –> WOKWi simulator project
- Profesionalny projekt : Parkovací zámok a vidlica prevodovky
- Zapnutím parkovacieho zámku sa prevodovka fyzicky uzamkne západka, ktorá sa zasunie do ozubeného kolieska na hriadeli čím sa zabráni otáčaniu hriadeľa, a tým aj hnaných kolies. Odblokovaním parkovacieho zámku sa západka zasunie a hriadeľ sa môže opäť voľne pohybovať. Poloha parkovacieho zámku je ovládaná magnetickým snímačom polohy, ktorý určuje polohy „P zapnuté“ a „P nezapnuté“. Podobným prípadom použitia je vidlica prevodovky, ktorá ovláda záber a odpojenie rôznych prevodových stupňov v prevodovke pomocoulineárnym pohybom. Snímače polohy sa používajú na zabezpečenie plynulého a bezpečnú prevádzku pri prepínaní prevodových stupňov. Pre obe aplikácie rôzne realizácie s Hallovými spínačmi, lineárnymi, uhlovými alebo 3D Hallovými snímačmi sú možné
- ZDROJE: URL: https://www.infineon.com/dgdl/Infineon-Parking_lock_and_gear_fork_in_transmission_systems-ApplicationBrief-v01_00-EN.pdf?fileId=8ac78c8c7e7124d1017f02c2ff907413
- LOCAL: …\Predmet_ELM_teoria\230906 Vybrane materialy k Elektrotechnickym meraniam\5_INE MATERIALY\3D Magneticky snimac INFINEON\Infineon-Parking_lock_and_gear_fork_in_transmission_systems.pdf
- Profesionalny projekt : Robustné a spoľahlivé snímanie polohy radiacej páky pomocou 3D snímačov polohy
- Páka voliča prevodových stupňov je rozhraním človek-stroj (HMI) medzi vodičom a prevodovým systémom. Pohybom páky sa volí prevodový stupeň. Nezávisle od
- typu prevodovky a tiež v elektrických vozidlách je detekcia radiacej páky potrebná na definovanie režimu jazdy (PNRD), zapnutie spätných svetiel alebo aktiváciu cúvacej kamery. Dnešné systémy sa riadia prístupom „shift-by wire“ bez mechanického prepojenia medzi radiacou pákou a prevodovkou. Jazdné stavy sa menia prostredníctvom elektronických ovládačov, vďaka čomu je riešenie snímania na detekciu každej polohy páky voliča prevodovky povinné
- Klasický dizajn páky voliča prevodovky
- Klasický vzhľad a pocit z radiacej páky už nie sú povinné. Rôzne realizácie, od otočných koliesok až po prepínače umiestnené v stredovej konzole alebo na
- hornom module stĺpika, možno nájsť na trhu. Na základe mechanickej realizácie sú možné rôzne riešenia snímania. Spoločným znakom všetkých je detekcia
- diskrétnych polôh. Keďže voľba jazdného režimu je kritická z hľadiska bezpečnosti, bežne sa používajú redundantné implementácie, ktoré sú povinné na prechod k autonómnej jazde. Bezkontaktné snímanie riešenia s magnetickými snímačmi polohy sú dnes najmodernejšie, aby spĺňali všetky požiadavky na spoľahlivosť a bezpečnostné požiadavky.
- Nezávisle od mechanickej koncepcie voliča prevodovky 3D magneticky snímač spoločnosti Infineon, ktorý zabezpečuje najvyššiu presnosť a spoľahlivosť, sa dokonale hodí. Zvyčajne sa používajú polia Hallových spínačov alebo 3D Hallove riešenia. TLE496x-xM sú integrované Hallove snímače, ktoré zabezpečujú ľahko použiteľné a nákladovo efektívne riešenie na snímanie polohy. aplikácie. Najmä v prípade vysokej teplotnej stability magnetického prahu. Naša inovatívna rodina 3D Hallových snímačov TLx493D sníma magnetickepole v troch rozmeroch, čo umožňuje vytvoriť systém prevodových pák s použitím iba dvoch 3D Hallových snímačov namiesto sústavy Hallových spínačov. Výhoda 3D Hallovej technológie spolu s vysokou presnosť a malé balenie umožňuje mimoriadne kompaktné konštrukcie systému.
- System benefits
- Robust and reliable designs
- High quality user experience
- Extremely compact systems
- Hall switch benefits
- The highest accuracy and proven quality
- Easy drop-in replacement
- ow power consumption enabling energy-efficient systems
- 3D magnetic sensor benefits
- High supply voltage range and load dump capability to ensure cost-effective designs
- Component reduction due to 3D magnetic measurement principle
- Best accuracy-package size fit
- Very low power consumption and extended battery lifetime
- Supporting platform approach due to high flexibility and configurability
- ISO 26262 Functional Safety Road vehicle – ready
- ZDROJE
- URL: https://www.infineon.com/dgdl/Infineon-Gear_stick-ApplicationBrief-v01_00-EN.pdf?fileId=8ac78c8c7ddc01d7017ddd26421c5fd4
- LOCAL: …\Predmet_ELM_teoria\230906 Vybrane materialy k Elektrotechnickym meraniam\5_INE MATERIALY\3D Magneticky snimac INFINEON\Infineon-Gear_stick-ApplicationBrief.pdf
3D magneticky senzor Infineon
5 apríla, 2024 | Posted by in Hlavná stránka - (Komentáre vypnuté na 3D magneticky senzor Infineon)LABORATÓRNE CVIČENIE č. 35 Meranie vlastností inerciálnej meracej jednotky (9 axis IMU)
25 marca, 2024 | Posted by in Hlavná stránka - (Komentáre vypnuté na LABORATÓRNE CVIČENIE č. 35 Meranie vlastností inerciálnej meracej jednotky (9 axis IMU))| STREDNÁ PRIEMYSELNÁ ŠKOLA J. MURGAŠA BANSKÁ BYSTRICA Elektrotechnické laboratóriá | |||||||||||
| Odbor: | Dátum merania: | ||||||||||
| Trieda: | Dátum odovzdania: | ||||||||||
| Skupina: | Vyučujúci: doc.RNDr.Juraj Pančík, CSc. | ||||||||||
| Laboratórium: | Klasifikácia: | Známka: | Podpis: | ||||||||
| Meno a priezvisko žiaka: | |||||||||||
| LABORATÓRNE CVIČENIE č. 35 Meranie vlastností inerciálnej meracej jednotky (9 axis IMU) | |||||||||||
| OBSAH: | |||||||||||
| 1. Názov cvičenia a jednotlivých úloh. | |||||||||||
| 2. Súpis prístrojov a pomôcok pri meraní. | |||||||||||
| 3. Popis meracej metódy a schéma merania. | |||||||||||
| 4. Tabuľky a grafy nameraných a vypočítaných hodnôt. | |||||||||||
| 5. Vyhodnotenie merania. | |||||||||||
| 1. NÁZOV CVIČENIA: | Meranie vlastností inerciálnej meracej jednotky (9 axis IMU) | ||||||||||
| Úlohy a) | Oboznámte sa s hardvérovým a softvérovým riešenia meracieho prípravku – 9 osová inerciálna meracia jednotka (IMU) so snímačom typu MEMS BNO 055. Vysvetlite zmerané a vypočítané veličiny poskytované týmto snímačom. | ||||||||||
| b) | Vykonajte merania vlastností pohybu a dynamickej zmeny polohy objektu. Pre meranie použite koncový bod jednoduchého kyvadla ako zdroj pohybu. | ||||||||||
| c) | Na základe vlastných meraní určite hodnotu dobu kyvu pri pohybe koncového bodu kyvadla. | ||||||||||
| d) | Zobrazte získané časové rady vybraných veličín vhodným zobrazovacím sw nástrojom (napríklad on line nástroj CHART STUDIO od fy. PLOTLY | ||||||||||
| e) | |||||||||||
| 2.SÚPIS POUŽITÝCH PRÍSTROJOV | |||||||||||
| Prístroj – pomôcka | Typové označenie a rozsah | Výrobca | Inventárne číslo | ||||||||
| 1. | MP c.35 Merací prípravok so snímačom typu MEMS BNO 055 | ||||||||||
| 2. | Mechanická zostava jednoduchého kyvadla | ||||||||||
| 3. | SW: Putty, Notepad++, EXCEL | ||||||||||
| Nedostatky pri hodnotení (zapíše vedúci merania učiteľ): | |||||||||||
3. Popis meracej metódy a schéma merania
Jednoduché kyvadlo – teória
Jednoduché kyvadlo má na rozdiel od dvojitého (či zloženého) iba jedno rameno. Vzťahy medzi fyzikálnymi veličinami dobre popisuje zdroj napr. (Blevins, 2016) a Obrázok 1. Vlastná frekvencia kyvadla nezávisí od hmotnosti kyvadla a je nepriamo úmerná druhej odmocnine z dĺžky ramena podľa rovnice nižšie (platí pre maximálny uhol výchylky menší ako 1 rad cca 57 ). Hodinové kyvadlo s periódou 2 s je 0,99 m dlhé a jeho spúšťací mechanizmus tiká raz za sekundu v krajných polohách kyvu kyvadla.
Obrázok 1 Zjednodušený model jednoduchého kyvadla ZDROJ: (Blevins, 2016)
Jednoduché kyvadlo – konštrukcia
Fotografia použitého jednoduchého kyvadla (v pohybe ) je uvedená na Obrázok 2 a v pokoji Obrázok 3
Obrázok 2 Snímok z videa pohybujúceho sa jednoduchého kyvadla so 9 axis IMU snímačom na jeho konci (ZDROJ: vlastné spracovanie)
Obrázok 3 Voľno visiace kyvadlo s detailami jeho konštrukcie. (ZDROJ: vlastné spracovanie)
Obrázok 4 ARDUINO rozširujúca doska 9axis IMU so snímačom BNO 055. ZDROJ: (ARDUINO Ltd., 2020)
Princíp merania parametrov pohybu koncového bodu jednoduchého kyvadla
Merací prípravok bol pripevnený na koniec ramena jednoduchého kyvadla Obrázok 3 s dĺžkou ramena L = 560 mm. Rameno kyvadla je vyrobené z plotovej smrekovej dosky so šírkou = 82 mm a hrúbkou = 18 mm.
Srdcom meracieho prípravku je 9 osová inerciálna meracia jednotka (IMU) so snímačom typu MEMS BNO 055 osadenom v rámci ARDUINO UNO shield-u (ARDUINO Ltd., 2020). Snímače parametrov pohybu MEMS (Bharath University, 2023), (Keim, 2018), (Analog Devices, 2015) sú veľmi významné pre technické odbory. Funkcie senzora BNO055 sú nasledovné : trojrozmerné zrýchlenie, rýchlosť odklonu (gyroskop v 3 osiach), údaje o intenzite magnetického poľa v 3 na seba kolmých osiach. Snímač poskytuje aj vypočítané signály fúzie senzorov, ako sú kvaternióny, eulerove uhly, vektor rotácie, lineárne zrýchlenie a vektor gravitácie. Inteligentný senzor BNO055 (BOSCH Sensortec. , 2023)je riešenie SiP (System in Package), ktoré integruje trojosový 14-bitový akcelerometer, presný trojosový 16-bitový gyroskop s uzavretou slučkou, trojosový geomagnetický senzor a 32-bitový mikrokontrolér so softvérom BSX3.0 FusionLib. Tento inteligentný senzor je výrazne menší ako porovnateľné riešenia. Integráciou senzorov a fúzie senzorov v jednom zariadení BNO055 uľahčuje integráciu, vyhýba sa zložitým multidodávateľským riešeniam, a tým zjednodušuje inovácie, napr. nové aplikácie, ako je hardvér internetu vecí. Snímač BNO055 je ideálnou voľbou pre rozšírenú realitu, hry, osobné zdravie a fitnes, navigáciu v interiéri a všetky ostatné aplikácie, ktoré vyžadujú kontextové povedomie. Ideálne sa hodí pre náročné aplikácie, ako je rozšírená realita, navigácia, hry, robotika alebo priemyselné aplikácie. Spoločnosti BOSCH Sensortec Ltd. a ARDUINO Ltd. poskytujú zadarmo sw knižnicu IMU ARDUINO LIBRARY : Arduino_NineAxesMotion. Táto sw knižnica umožnila integráciu nášho snímača do meraní.
Data acquisition – zber údajov
| =~=~=~=~=~=~=~=~=~=~=~= PuTTY log 2024.01.20 09:50:51 =~=~=~=~=~=~=~=~=~=~=~= lY: -0.53 lZ: -0.02 gX: 0.50 gY: -9.78 gZ: e: 0.10 aZ: -0.78 lX: -0.26 lY: 0.02 lZ: 0.00 gX: 9.77 gY:10909 qX: 2405 qY: -11794 qZ: 2133Time: 310627 aX: 9.50 aY: 0.10 aZ: -0.78 lX: -0.26 lY: 0.02 lZ: 0.00 gX: 9.77 gY:rţDefault accelerometer configuration settings…Range: 1 Bandwidth: 3 Power Mode: 0 Streaming in …3…2…1…Time: 3990 aX: 9.48 aY: 0.11 aZ: -0.81 lX: -0.29 lY: -0.01 lZ: -0.08 gX: 9.77 gY: 0.13 gZ: -0.72 eH: 0.00 eR: 85.69 eP: -179.19 qW: 11149 qX: 161 qY: -12004 qZ: -3Time: 4017 aX: 9.49 aY: 0.10 aZ: -0.78 lX: -0.28 lY: -0.02 lZ: -0.05 gX: 9.77 gY: 0.13 gZ: -0.72 eH: 0.00 eR: 85.69 eP: -179.19 qW: 11149 qX: 161 qY: -12004 qZ: -3 |
Bol napísaný program pre platformu ARDUINO UNO založený na spomenutej sw knižnici ARDUINO LIBRARY Arduino_NineAxesMotion. Program inicializuje snímač BNO 055 a cyklicky vyčítava všetky zmerané a snímačom vypočítané „fusion“ údaje tieto posiela na sériovú linku. Terminálový program v počítači (PUTTY.EXE) umožňuje záznam (tzv. „log“) údajov vysielaných ARDUINOM do textového súboru (napríklad) putty_LOG.txt. Záznam tlmených kyvov jednoduchého kyvadla trvá 2 minúty, frekvencia čítania dát je 50 Hz (120 s x 50 = cca 6000 riadkov). Zaznamenaný súbor putty_LOG.txt sa upravil – pomocou textového editora (Notepad++) sa desatinné bodky zamenili za čiarky (je to kvôli kompatibilite s EXCEL – om pri importe dát). Následne sa súbor putty_LOG.txt importoval do EXCEL-u a excelovský súbor sa uložil (ako napr.) 230118 PENDULUM_1.xlsx. Zaznamenané dáta v čase (tzv. TIME SERIES) sa „vizualizovali“ a spracovávali v online nástroji CHART STUDIO PLOTLY (PLOTLY, 2024), ktorého výrobca je spoločnosť PLOTLY.
Obrázok 5 Úvodná sekvencia textového záznamu ukazujúca počiatočné nastavenia snímača BNO 055. ZDROJ: vlastné spracovanie
Obrázok 6 Časová séria údajov zo snímača BNO055 importovaná zo súboru TXT určená pre ďalšie spracovanie. ZDROJ: vlastné spracovanie
Data processing – vyhodnotenie údajov
Údaje sme vyhodnocovali pre zmeranie doby kyvu kyvadla pre zmeranú dĺžku ramena L=560 mm. Z časovej série pre Eulerov uhol eR (ROLL) (viď. Obrázok 7) sme po zväčšení (viď. Obrázok 8) sme vybrali časy prechodu hodnoty eR cez nulu a zaznamenali sme výsledky do Tabuľka 1.
4. Tabuľky a grafy nameraných a vypočítaných hodnôt.
Obrázok 7 Záznam časovej série eulerovho uhlu eR (ROLL). ZDROJ: vlastné spracovanie
Obrázok 8 Detail záznamu časovej série eulerovho uhlu eR (ROLL). ZDROJ: vlastné spracovanie
| n. | Časová značka (ms) | Doba trvania polperiody (ms) | Zmeraná frekvencia kyvu kyvadla (Hz) | Vypočítaná frekvencia kyvadla pre L = 0,560m | Rozdiel medzi zmeranou a vypočítanou frekvenciou kyvu (s) |
| 0 | 6697 | ||||
| 7553 | 856 | 0,58 | 0,6664704 | 0,08 | |
| 1 | 8380 | 827 | 0,60 | 0,6664704 | 0,06 |
| 9262 | 882 | 0,57 | 0,6664704 | 0,10 | |
| 2 | 10065 | 803 | 0,62 | 0,6664704 | 0,04 |
| 10920 | 855 | 0,58 | 0,6664704 | 0,08 | |
| 3 | 11724 | 804 | 0,62 | 0,6664704 | 0,04 |
| 12552 | 828 | 0,60 | 0,6664704 | 0,06 | |
| 4 | 13383 | 831 | 0,60 | 0,6664704 | 0,06 |
| 14188 | 805 | 0,62 | 0,6664704 | 0,05 | |
| 5 | 15014 | 826 | 0,61 | 0,6664704 | 0,06 |
| 15796 | 782 | 0,64 | 0,6664704 | 0,03 | |
| 6 | 16601 | 805 | 0,62 | 0,6664704 | 0,05 |
| 17428 | 827 | 0,60 | 0,6664704 | 0,06 | |
| 7 | 18182 | 754 | 0,66 | 0,6664704 | 0,00 |
| 19013 | 831 | 0,60 | 0,6664704 | 0,06 | |
| 8 | 19789 | 776 | 0,64 | 0,6664704 | 0,02 |
| 20594 | 805 | 0,62 | 0,6664704 | 0,05 | |
| 9 | 21348 | 754 | 0,66 | 0,6664704 | 0,00 |
| 22153 | 805 | 0,62 | 0,6664704 | 0,05 | |
| 10 | 22933 | 780 | 0,64 | 0,6664704 | 0,03 |
| 23711 | 778 | 0,64 | 0,6664704 | 0,02 | |
| 15331,18 | 810,19 | 0,62 | 0,67 | 0,05 |
Tabuľka 1 Zmerané časy prechodu uhla eR (ROLL) cez nulu, vypočítané a zmerané doby kyvu kyvadla. ZDROJ: vlastné spracovanie
5. Vyhodnotenie merania
Merania doby kyvu jednoduchého kyvadla na základe záznamu jedného z eulerových uhlov (ROLL) poukázali na výbornú zhodu s vypočítanou (0,05s t.j. 7%). Hodnota L reprezentuje vzdialenosť teoretického bodu ťažiska kyvadla od bodu otáčania a preto je L predmetom odhadu. Doba kyvu pri tlmených kmitoch kyvadla sa nemení a naše je dôkazom fyzikálnej teórie. Záznam tlmených kyvov jednoduchého kyvadla trvá 2 minúty, frekvencia čítania dát je 50 Hz (120 s x 50 = cca 6000 riadkov) čo už predstavuje príklad tzv. BIG DATA. Technika zobrazenia a analýzy dlhých časových radov pomocou dedikovaných nástrojov je moderná metóda. Pre pochopenie meraných a vypočítavaných veličín snímačom BNO055 je táto metóda veľmi účinná.
6. Informačné zdroje
Analog Devices. 2015. Accelerometer and Gyroscopes Sensors: Operation, Sensing, and Applications. [Online] 17. 3 2015. [Dátum: 25. 2 2024.] https://www.analog.com/en/technical-articles/accelerometer-and-gyroscopes-sensors-operation-sensing-and-applications.html.
ARDUINO Ltd. 2020. ARDUINO 9 Axis Motion Shield. [Online] 2020. [Dátum: 25. 2 2024.] https://docs.arduino.cc/hardware/9-axis-motion-shield.
Bharath University. 2023. Introduction to MEMS (Microelectromechanical Systems). [Online] 2023. [Dátum: 25. 02 2024.] https://www.bharathuniv.ac.in/page_images/pdf/courseware_eee/Notes/NE3/BEE026%20MEMS.pdf.
Blevins, Robert D. 2016. Formulas for dynamics, acoustics and vibration. s.l. : Willey, 2016. s. 119-120. ISBN 978-1-119-03811-5.
BOSCH Sensortec. . 2023. Smart sensor: BNO055 Integrated MCU + flash. Integrated sensor fusion. [Online] 2023. [Dátum: 25. 2 2024.] https://www.bosch-sensortec.com/products/smart-sensor-systems/bno055/.
Keim, Robert. 2018. Introduction to MEMS (Microelectromechanical Systems). [Online] 4. 12 2018. [Dátum: 25. 2 2024.] https://www.allaboutcircuits.com/technical-articles/introduction-to-mems-microelectromechanical-systems/.
PLOTLY. 2024. CHART STUDIO PLOTLY. [Online] https://en.wikipedia.org/wiki/Plotly, 2024. [Dátum: 25. 02 2024.] https://chart-studio.plotly.com/create/#/.
Meranie č.35 : Meranie vlastností inerciálnej meracej jednotky (9 axis IMU)
25 marca, 2024 | Posted by in Hlavná stránka - (Komentáre vypnuté na Meranie č.35 : Meranie vlastností inerciálnej meracej jednotky (9 axis IMU))Ciele merania (Úlohy) :
- Oboznámte sa s hardvérovým a softvérovým riešenia meracieho prípravku – 9 osová inerciálna meracia jednotka (IMU) so snímačom typu MEMS BNO 055. Vysvetlite zmerané a vypočítané veličiny poskytované týmto snímačom.
- Vykonajte merania vlastností pohybu a dynamickej zmeny polohy objektu. Pre meranie použite koncový bod jednoduchého kyvadla ako zdroj pohybu.
- Na základe vlastných meraní určite hodnotu dobu kyvu pri pohybe koncového bodu kyvadla.
- Zobrazte získané časové rady vybraných veličín vhodným zobrazovacím sw nástrojom (napríklad on line nástroj CHART STUDIO od fy. PLOTLY
POZNAMKA:
— u kazdeho merania/vypoctu urobte chybovu analyzu a skontrolujte spravnost mikropocitacovym programom vykonanych vypoctov
Pokyny pre spracovanie meracieho protokolu :
— Na zaklade nameranych udajov bol vypracovany vzorovy meraci protokol (subor WORD) s prilohou [3] (subor EXCEL)
— detailnejsi postup pri priprave protokolov prejdeme na hodinach ELMc
Merací protokol (Google Drive https://drive.google.com/drive/folders/19roGOVXPYTavLFDBc2j-iR7rXj5iAlNv?usp=sharing):
Sablona suboru WORD na Google Drive: …Predmet_ELM_cvicenia\WORK_5 NEVEL Meranie s 9 axis IMU\ELM_MP35_PANCIK_JURAJ.docx
Sablona suboru EXCEL – prilohy : …Predmet_ELM_cvicenia\WORK_5 NEVEL Meranie s 9 axis IMU\ELM_MP35_PANCIK_JURAJ PRILOHA.xlsx
Pokyny pre spracovanie meracieho protokolu :
— Na zaklade nameranych udajov bol vypracovany vzorovy meraci protokol (subor WORD) s prilohou (subor EXCEL)
— detailnejsi postup pri priprave protokolov prejdeme na hodinach ELMc
— vzorový protokol z laboratórneho merania je TU
LITERATÚRA:
Analog Devices. 2015. Accelerometer and Gyroscopes Sensors: Operation, Sensing, and Applications. [Online] 17. 3 2015. [Dátum: 25. 2 2024.] https://www.analog.com/en/technical-articles/accelerometer-and-gyroscopes-sensors-operation-sensing-and-applications.html.
ARDUINO Ltd. 2020. ARDUINO 9 Axis Motion Shield. [Online] 2020. [Dátum: 25. 2 2024.] https://docs.arduino.cc/hardware/9-axis-motion-shield.
Bharath University. 2023. Introduction to MEMS (Microelectromechanical Systems). [Online] 2023. [Dátum: 25. 02 2024.] https://www.bharathuniv.ac.in/page_images/pdf/courseware_eee/Notes/NE3/BEE026%20MEMS.pdf.
Blevins, Robert D. 2016. Formulas for dynamics, acoustics and vibration. s.l. : Willey, 2016. s. 119-120. ISBN 978-1-119-03811-5.
BOSCH Sensortec. . 2023. Smart sensor: BNO055 Integrated MCU + flash. Integrated sensor fusion. [Online] 2023. [Dátum: 25. 2 2024.] https://www.bosch-sensortec.com/products/smart-sensor-systems/bno055/.
Keim, Robert. 2018. Introduction to MEMS (Microelectromechanical Systems). [Online] 4. 12 2018. [Dátum: 25. 2 2024.] https://www.allaboutcircuits.com/technical-articles/introduction-to-mems-microelectromechanical-systems/.
PLOTLY. 2024. CHART STUDIO PLOTLY. [Online] https://en.wikipedia.org/wiki/Plotly, 2024. [Dátum: 25. 02 2024.] https://chart-studio.plotly.com/create/#/.
Hlavicka_programu_C#_SR2023-24
25 marca, 2024 | Posted by in Hlavná stránka - (Komentáre vypnuté na Hlavicka_programu_C#_SR2023-24)— program v C# napisany v prostredi .NET Fiddle musi obsahovat nasledovnu hlavicku:
/**************************
Meno a Priezvisko :
Datum :
Uloha :
(text zo zadania EDUPAGE, napr.CW12/24 SKUPINA S1 ALGORITMY_5: ZORADENIE TROCH CISIEL PODLA VELKOSTI S RESPEKTOVANIM VYSLEDKU PREDCHADZAJUCEHO KROKU)
PSEUDOKOD : – zapis algoritmu podla vzorov v knihe MARES-VALLA kap.1
******************************/
LABORATÓRNE CVIČENIE č. 32 Meranie teploty s termočlánkom typu K
29 februára, 2024 | Posted by in Hlavná stránka - (Komentáre vypnuté na LABORATÓRNE CVIČENIE č. 32 Meranie teploty s termočlánkom typu K)Meranie teploty s infračerveným teplomerom
6 februára, 2024 | Posted by in Hlavná stránka - (Komentáre vypnuté na Meranie teploty s infračerveným teplomerom)| STREDNÁ PRIEMYSELNÁ ŠKOLA J. MURGAŠA BANSKÁ BYSTRICA Elektrotechnické laboratóriá | ||||||||||||||
| Odbor: | Dátum merania: | |||||||||||||
| Trieda: | Dátum odovzdania: | |||||||||||||
| Skupina: | Vyučujúci: doc.RNDr.Juraj Pančík, CSc. | |||||||||||||
| Laboratórium: | Klasifikácia: | Známka: | Podpis: | |||||||||||
| Meno a priezvisko žiaka: | ||||||||||||||
| LABORATÓRNE CVIČENIE č. 34 Meranie teploty s infračerveným teplomerom a odhad emisivity kovových povrchov | ||||||||||||||
| OBSAH: | ||||||||||||||
| 1. Názov cvičenia a jednotlivých úloh. | ||||||||||||||
| 2. Súpis prístrojov a pomôcok pri meraní. | ||||||||||||||
| 3. Popis meracej metódy a schéma merania. | ||||||||||||||
| 4. Tabuľky a grafy nameraných a vypočítaných hodnôt. | ||||||||||||||
| 5. Vyhodnotenie merania. | ||||||||||||||
| 1. NÁZOV CVIČENIA: | Meranie teploty s infračerveným teplomerom a odhad emisivity kovových povrchov | |||||||||||||
| Úlohy a) | Oboznámte sa s hardvérovým a softvérovým riešenia meracieho prípravku – infračerveného bezkontaktného teplomeru s IR snímačom MELEXIS MLX90614 | |||||||||||||
| b) | S infračerveným (IR) teplomerom vykonajte merania teploty povrchu kovového objektu s rôznymi nátermi. Použite referenčnú IR termokameru. | |||||||||||||
| c) | Na základe vlastných meraní odhadnite emisivitu povrchu kovovej nádoby s rôznymi povrchmi a vysvetlite rôzne hodnoty nameranej teploty IR bezkontaktnou metódou. | |||||||||||||
| d) | ||||||||||||||
| e) | ||||||||||||||
| 2.SÚPIS POUŽITÝCH PRÍSTROJOV | ||||||||||||||
| Prístroj – pomôcka | Typové označenie a rozsah | Výrobca | Inventárne číslo | |||||||||||
| 1. | MP c.34 Merací prípravok pre bezkontaktné meranie teploty (infračervený (IR) teplomer ) | |||||||||||||
| 2. | Infračervený (IR) teplomer | UT300A+ | Unitest, Čína | |||||||||||
| 3. | Infračervená kamera | FLIR C3-X | FLIR, USA | |||||||||||
| Nedostatky pri hodnotení (zapíše vedúci merania učiteľ): | ||||||||||||||
3. Popis meracej metódy a schéma merania
Princíp bezkontaktného merania teploty.
Srdcom meracieho prípravku je vysoko presný bezkontaktný infračervený snímač teploty od spoločnosti MELEXIS – MLX90614 [1]. Na rozdiel od väčšiny snímačov teploty tento snímač meria teplotu bez fyzického dotyku. Infračervené teplomery, ako napríklad MLX90614, využívajú skutočnosť, že akýkoľvek objekt vrátane človeka, ktorého teplota je vyššia ako absolútna nula (0°K alebo -273 °C), vyžaruje (ľudským okom neviditeľné) svetlo v infračervenom spektre, ktoré je priamo úmerné jeho teplote. Vnútorne je MLX90614 dvojicou dvoch zariadení: infračerveného termočlánkového detektora (thermopile detector) a ASSP (aplikačného procesora na úpravu signálu).
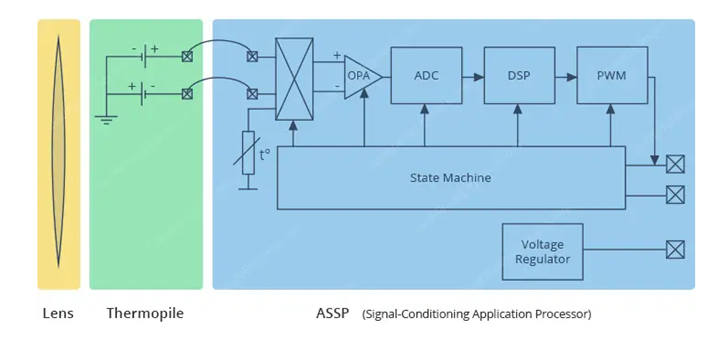
Obrázok 1 Bloková schéma vnútorného zapojenia IR snímača MLX90614 [1]
Termočlánok typu (thermopile detector) je elektronické zariadenie, ktoré premieňa tepelnú energiu na elektrickú [2] a skladá sa z niekoľkých termočlánkov zapojených zvyčajne sériovo alebo menej často paralelne. Takéto zariadenie funguje na princípe termoelektrického efektu, t. j. generuje napätie, keď sú jeho rôznorodé kovy (termočlánky) vystavené teplotnému rozdielu. Výstupné napätie tohto termočlánku je priamo úmerné infračervenému tepelnému toku Φ prechádzajúcemu cez vrstvy tepelného odporu termočlánku. Na Obrázok 1 je vnútorná bloková schéma MLX90614, ktorá zobrazuje thermopilný detektor a aj ASSP (Application Signal Condition Application Processor) [3] . Infračervené žiarenie vyžarované objektom alebo človekom sa najprv sústredí pomocou konvergentnej (konvexnej) šošovky na špeciálny infračervený detektor nazývaný Thermopile. Termočlánok sníma, koľko infračervenej energie vyžarujú objekty v jeho zornom poli (FOV), a generuje tomu úmerný elektrický signál. Napätie vytvorené termočlánkom sa zachytí 17-bitovým ADC v ASSP a potom sa spracuje pred odoslaním do mikrokontroléra.
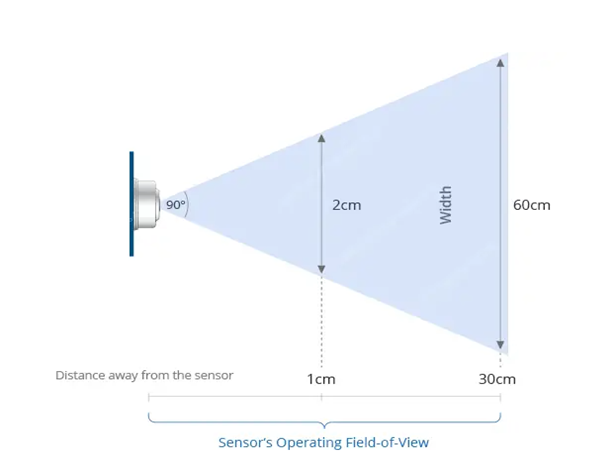
Obrázok 2 Zorné pole IR snímača teploty
Zorné pole (FOV).
Zorné pole (FOV, Field Of View) infračerveného teplomera je jedným z najdôležitejších parametrov, ktoré je potrebné poznať. Je určené uhlom, v ktorom je snímač citlivý na tepelné žiarenie [1]. To znamená, že snímač zistí všetky objekty v zornom poli a vráti priemernú teplotu všetkých objektov v ňom. Pre MLX90614 infračervený teplomer zorné pole je dôležité, aby meraný objekt úplne vyplnil zorné pole. V opačnom prípade môže snímač detegovať objekty, ktoré sa nemajú merať, čo má za následok nepresné merania. Infračervený teplomer MLX90614 zorné pole 90°. Zorné pole určuje aj vzťah medzi vzdialenosťou od objektu a snímanou oblasťou. Ak sa snímač nachádza v blízkosti objektu, jeho snímacia oblasť je veľmi úzka, ale so vzdialenosťou sa stále viac rozširuje.
Merací prípravok s IR snímačom. Snímač MLX90614 sa integroval s jednodoskovým počítačom ARDUINO UNO Rev.3 prostredníctvom zbernice I2C. Softvérová knižnica bola poskytnutá spoločnosťou ADAFRUIT Inc. (USA) [3]. Program v ARDUINO prečítal po I2C zbernici hodnotu zmeranej teploty a posielal ju po sériovej linke do meracieho počítača.
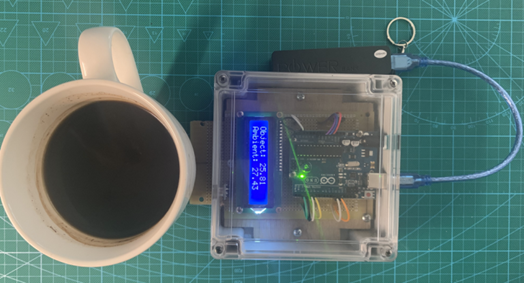
Obrázok 3 Fotografia nami použitého meracieho prípravku s IR snímačom snímajúcim tepelné žiarenie z povrchu šálky.
Meracia metóda : bezkontaktné meranie teploty.
V nasledovnom popíšeme merania s infračerveným (IR) teplomerom kde sme vykonali merania teploty povrchu kovového objektu s rôznymi nátermi. Infračervený teplomer je zariadenie na bezkontaktné meranie teploty pomocou snímania energie vyžiarenej povrchom meraného objektu. Je potrebné si uvedomiť a pri meraní zohľadniť, že meriame teplotu povrchu telesa, nie teplotu vo vnútri telesa. Ručné modely infračervených teplomerov sú spravidla vybavené jedným alebo viacerými laserovými lúčmi na vyznačenie meraného miesta. Meranie prebieha vždy z plochy úmernej vzdialenosti podľa použitej optiky.
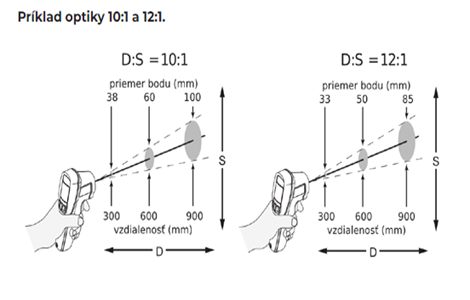
Obrázok 4 Definícia „Distance to Spot“ pre IR teplomer [4]
IR teplomer spravidla pracuje v infračervenej oblasti v rozmedzí 8-14 µm. Zariadenia, ktoré majú viacero snímačov napríklad v matici 16 × 16 označujeme ako termoskop alebo maticový pyrometer. Termokamera sa vyznačuje omnoho väčším rozlíšením, pokročilejšou optikou a funkciami. Pre špeciálne aplikácie sa používajú modely pracujúce na dvoch vlnových dĺžkach. V takom prípade nie je potrebné poznať emisivitu povrchu a meranie môže prebiehať aj v zahmlenom prostredí. Základnou podmienkou pre dobré meranie je vzájomná poloha teplomeru a meraného objektu a ich vzdialenosť. Snažíme sa umiestniť teplomer kolmo k meranému povrchu do takej vzdialenosti, aby bol merací bod o cca 20% menší ako objekt ktorý meriame. V anglickej literatúre sa používa označenie Field of View (zorné pole). Meraný objekt teda umiestňujeme do stredu zorného poľa teplomeru [4]. Pre naše merania sme použili pyrometer UT300A+ [5]. Veľkosť meracieho bodu sa mení podľa použitej optiky a rastie so zväčšujúcou sa vzdialenosťou. Každý prístroj ma inú optiku a objektív, preto je zvykom výrobcov umiestniť na infračervený teplomer nálepku s tabuľkou vzdialeností alebo nákresom. Tento parameter sa označuje ako Distance to Spot ratio skrátene D:S, viď. Obrázok 4. Pomer určuje aký veľký bude merací bod v určitej vzdialenosti. Pomer 1:1 znamená, že vo vzdialenosti 1 m bude priemer meracieho bodu 1 m. Pomer 10:1 znamená 2 cm veľký merací bod vo vzdialenosti 20cm.

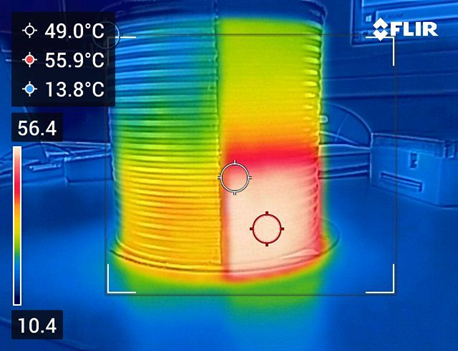
Obrázok 5 Meracia nádoba – snímka kamerou FLIR C3-X vo viditeľnom a infračervenom spektre
Meracia nádoba bola oceľová pozinkovaná plechová konzerva s objemom 3l ktorej povrch sme natreli dvoma samovypaľovacími farbami (tzv. „striebrenka“ t.j. hliníkový prášok [6] a čierna [7]) určenými pre náter vybraných častí vykurovacích telies (každá farba pokryla 120 stupňovú výseč valcového povrchu, pričom posledná výseč povrchu konzervy zostala nenatretá – išlo o galvanizovaný oceľový plech (lesklý zinkový povrch)). Do meracej nádoby sme vliali vriacu vodu a zaznamenali sme oboma IR teplomermi (UT300A+ a náš merací prípravok so snímačom MLX90614 ) zistené hodnoty bezkontaktných teplôt. Teplota vody v nádobe bola meraná termočlánkom typu K (viď. zrealizované meranie č.32 : Meranie teploty v priemysle).
Meracia metóda : odhad tepelnej emisivity rôznych povrchov meranej nádoby.
Pri meraní teploty infračerveným teplomerom alebo termokamerou meriame množstvo energie ktorý vyžaruje (alebo odráža!) meraný objekt k meraciemu prístroju. Pri tomto meraní je dôležitý údaj emisivita materiálu ktorý meriame. Emisivita je bezrozmerná veličina určujúca koľko tepla nám daný materiál vyžaruje (emituje) do okolia. Princíp merania a jej vplyv ilustruje Obrázok 6. Emisivita je definovaná ako pomer intenzity vyžarovania reálneho telesa k intenzite vyžarovania absolútne čierneho telesa s rovnakou teplotou. Emisivita absolútne čierneho telesa je 1, emisivita ideálneho zrkadla je 0.
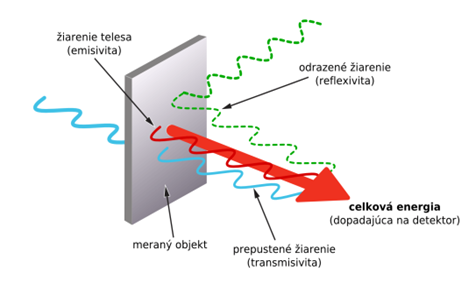
Obrázok 6 Princíp bezkontaktného merania a vplyv emisivity [8]
Ako ďalší parameter bezkontaktného merania teploty vstupuje transmisivita (0..1). Spolu s emisivitou určujeme aj parameter reflexivita (koľko tepla odráža), ich vzájomný súčet je 1. Transmisivita je údaj ako daný materiál alebo prostredie prepúšťa žiarenie v použitej vlnovej dĺžke. Pri meraní „na vzduchu“ tento parameter zväčša zanedbávame, ak meriame cez priezor, je potrebné počítať aj s hodnotou transmisivity. Obecne platí, že profesionálne zariadenia majú emisivitu prestaviteľnú od 0-1 po krokoch 0,01. Pri meraní je rozhodujúci materiál povrchovej vrstvy meraného predmetu. Pri bezkontaktnom meraní teploty kovu ktorý je natretý nastavujeme emisivitu povrchu, v tomto prípade hodnotu emisivitu náteru a nie emisivitu ocele. Závislosť chyby bezkontaktného merania teploty na emisivite zobrazuje nasledujúci graf na Obrázok 7 [8] [9]
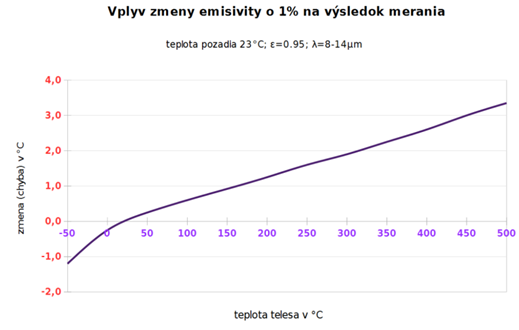
Obrázok 7 Vplyv zmeny emisivity o 1% percento na výsledok bezkontaktného merania teploty [8]
Meranie emisivity môže byť veľmi náročné meranie zvlášť kvôli špeciálnemu vybaveniu [10] [11] [12]. V našom prípade sme ju mohli iba odhadnúť s využitím kontaktného merania teploty horúcej vody v meracej kovovej nádobe. Následne sme pri nastavenej emisivite = 1 opakovane bezkontaktne merali teplotu IR teplomerom a naším meracím prípravkom. Termokamerou sme sledovali rozloženie povrchových teplôt meracej nádoby tak, aby sme pri bodovom bezkontaktnom meraní teploty zaznamenali teplotu z čo najhomogénnejšieho rozloženia povrchových teplôt.
4. Tabuľky a grafy nameraných a vypočítaných hodnôt.
| TEPLOTA VODY | POVRCH MATNÁ ČIERNA | ||
| MERANIE | TEPLOTA VODY merané s MP c.2 [°C] | ROZDIEL TEPLOT KONTATNÉ – BEZKONTAKTNĚ MP c.2-IR UT300A+ | ROZDIEL TEPLOT KONTATNÉ – BEZKONTAKTNĚ MP c.2-MP c.3 |
| 1 | 90,9 | 3,1 | 6,6 |
| 2 | 90 | 6,4 | 12,31 |
| 3 | 88,25 | 5,55 | 12 |
| 4 | 69,4 | 1,5 | 4,79 |
| POVRCH MATNÁ ČIERNA | |||
| TEPLOTA MERANA IR TEPLOMEROM IR UT300A+ [°C] | EMSIVITA VYPOCITANA Z MERANI S IR TEPLOMEROM ε | TEPLOTA MERANA MP č.3 [°C] | EMSIVITA VYPOCITANA Z MERANI S IR PRIPRAVKOM ε |
| 87,8 | 0,97 | 84,3 | 0,93 |
| 83,6 | 0,93 | 77,69 | 0,86 |
| 82,7 | 0,94 | 76,25 | 0,86 |
| 67,9 | 0,98 | 64,61 | 0,93 |
| POVRCH MATNÁ STRIEBORNÁ | |||
| TEPLOTA MERANA IR TEPLOMEROM IR UT300A+ [°C] | EMSIVITA VYPOCITANA Z MERANI S IR TEPLOMEROM ε | TEPLOTA MERANA MP č.3 [°C] | EMSIVITA VYPOCITANA Z MERANI S IR PRIPRAVKOM ε |
| 51,1 | 0,58 | 52,79 | 0,63 |
| 52 | 0,62 | 49,87 | 0,64 |
| 51,8 | 0,63 | 51,65 | 0,68 |
| 44,4 | 0,65 | 48,89 | 0,76 |
| POVRCH GALVANIZOVANY OCEĽOVÝ PLECH | |||
| TEPLOTA MERANA IR TEPLOMEROM IR UT300A+ [°C] | EMSIVITA VYPOCITANA Z MERANI S IR TEPLOMEROM ε | TEPLOTA MERANA MP č.3 [°C] | EMSIVITA VYPOCITANA Z MERANI S IR PRIPRAVKOM ε |
| 28,8 | 0,33 | 32,4 | 0,38 |
| 30 | 0,36 | 29,4 | 0,38 |
| 30,8 | 0,37 | 31,35 | 0,41 |
| 28,8 | 0,42 | 35,85 | 0,55 |
5. Vyhodnotenie merania
- Gradient prestupu tepla z horúcej vody cez steny meracej nádoby vytvára homogénne tepelné pole na povrchu vhodné pre meranie bezkontaktným spôsobom.
- Voda sa v meracej nádobe rýchlo ochladzuje čo môže ovplyvniť opakovateľnosť meraní.
- Hodnoty teplôt povrchu získané meracím prípravkom s IR snímačom a IR teplomerom sú si blízke pre všetky tri vyhodnocované povrchy (galvanizovaná oceľ (0,30), čierny (0,95) a „striebrenkový“ (0,60) náter povrchu).
- Získané hodnoty emisivity vyhodnocovaných povrchov sú reálne a zodpovedajú viacerým dostupným tabuľkám emisivít upravených či modifikovaných povrchov kovov ( [13] [14] [15] [16])
- Tabuľky emisivít povrchov mnohých materiálov sú viazané na určité teploty, ktoré sú zvyčajne vyššie ako teploty používané nami
- Teplo pri ochladzovaní elektrických komponentov sa odvádza vedením, prúdením a radiáciou [11] . Na základe našich meraní by chladič polovodičového prvku by mal mať povrch s vysokou emisivitou, aby tak umožnil radiačnej zložke tepla čo najlepší odvod energie.
- Predpokladáme, že varné platne sporákov sa natierajú na čierno (napr. grafitom či samovypaľovacími farbami [7]) aby efektívnejšie prenášali teplo do nádob vďaka vyššej hodnote emisivity a naopak emisivita dymovodov sa znižuje striebrenkovým náterom [6] aby zbytočne nevyhrievali miestnosti, kde sa varí. Satelity a helmy požiarnikov majú pozlátený povrch s veľmi nízkou emisivitou aby ich radiačné teplo z okolia neprehrievalo absorpciou tepelného žiarenia. Efekt znižovania tepelných strát vyžarovaním majú aj „zlaté fólie“ používané záchranármi.
6. Informačné zdroje
| [1] | MELEXIS, „MLX90614 family Datasheet Single and Dual Zone Infra Red Thermometer in TO-39,“ [Online]. Available: https://www.melexis.com/-/media/files/documents/datasheets/mlx90614-datasheet-melexis.pdf. [Cit. 16 12 2023]. |
| [2] | Wikipedia, „Thermopile,“ [Online]. Available: https://en.wikipedia.org/wiki/Thermopile. |
| [3] | „Interface MLX90614 Non-contact Infrared Temperature Sensor with Arduino,“ [Online]. Available: https://lastminuteengineers.com/mlx90614-ir-temperature-sensor-arduino-tutorial/. [Cit. 16 12 2023]. |
| [4] | T. ELSO.SK, „Infračervený teplomer / Pyrometer bezkontaktný teplomer, infrared thermometer,“ [Online]. Available: https://www.elso.sk/sk/blog/technologie/ako-merat-infracervenym-teplomerom. [Cit. 19 12 2023]. |
| [5] | UNI-T, „UT300A+ dartasheet,“ [Online]. Available: https://www.2mtechnologies.sg/images/pdf/products/uni-t/thermometer/ut300a.pdf. [Cit. 16 12 2023]. |
| [6] | A. s. 0910. [Online]. Available: https://www.natri.sk/tovar/farba-aluksyl-0910-strieborna-80g. [Cit. 16 12 2023]. |
| [7] | A. v. f. c. 0199. [Online]. Available: https://colormania.sk/aluksyl-farba-na-vysoke-teploty&plu=23811. |
| [8] | T. ELSO.SK, „Emisivita,“ [Online]. Available: https://www.elso.sk/sk/blog/technologie/emisivita. [Cit. 16 12 2023]. |
| [9] | V. Francois-Xavier, „Emisivita – dEfinícia a vplyv na bEzkontaktné mEraniE tEploty,“ 4 3 2016. [Online]. Available: https://www.linkedin.com/pulse/emisivita-defin%C3%ADcia-vplyv-na-bezkontaktn%C3%A9-meranie-francois-xavier/. [Cit. 16 12 2023]. |
| [10] | „Meranie stupňa emisivity ( E ),“ [Online]. Available: http://termokamery.net/index.php?route=product/category&path=61_68. [Cit. 16 12 2023]. |
| [11] | J. Gančev, „Emisivita a její vliv na odvod tepla,“ Vysoké učení technické v Brně, Brno, 2016. |
| [12] | „Měření hustoty tepelného toku, emisivita materiálů,“ [Online]. Available: https://www.fbi.vsb.cz/export/sites/fbi/030/.content/galerie-souboru/studijni-materialy/TechnickaMereni/Uloha5TepelnyTok.pdf. [Cit. 16 12 2016]. |
| [13] | ELSO.SK, „Tabuľka emisivít,“ [Online]. Available: https://www.elso.sk/sk/blog/technologie/tabulka-emisivity-materialov. [Cit. 16 12 2023]. |
| [14] | P. E. KOVŮ. [Online]. Available: https://eu.fme.vutbr.cz/file/vomm/2001.htm. [Cit. 16 12 2023]. |
| [15] | FLUKE, „Emissivity values of,“ [Online]. Available: https://dam-assets.fluke.com/s3fs-public/3038318_6251_ENG_C_W.PDF. |
| [16] | „Hodnoty emisivity běžných materiálů,“ [Online]. Available: https://www.fbi.vsb.cz/export/sites/fbi/030/.content/galerie-souboru/studijni-materialy/TechnickaMereni/5_EmisivitaBeznychMaterialu.pdf. [Cit. 16 12 2023]. |
ARCHIV IoT, prax, II.IT, 2P, ŠR 23/24
31 januára, 2024 | Posted by in Hlavná stránka - (Komentáre vypnuté na ARCHIV IoT, prax, II.IT, 2P, ŠR 23/24)-
************ KONCI SKUPINA P2 ******************************
- CW47 streda 22.11. 2023 IoT Prax P2 (3h)
- AGENDA:
- JuPa poskytne studentom radarovy snimac : ESP32 with RCWL-0516 Microwave Radar Proximity Sensor (Arduino IDE) ( https://randomnerdtutorials.com/esp32-rcwl-0516-arduino/ )
- Ing. Dokoupil : buduci tyzden sa striedaju skupiny – hovorime o znamkovani
- So studentami uzatvarame znamky z jednotlivych uloh, JuPa este prida do hodnotenia hodnotenie pisomky z PWM a dnesny projekt „RADAR“
- VYUCBA :
- POZNAMKA:
- EXPERIMENTOVANIE – PRIJEM ZNAKOV PO SERIOVEJ LINKE
- PRILOHA: ARDUINO seriova linka – BUILT IN EXAMPLES – SerialEvent
https://docs.arduino.cc/built-in-examples/communication/SerialEvent - PRILOHA: ARDUINO seriova linka – ARDUINO Forum prijem znakov LINKhttps://forum.arduino.cc/t/serial-input-basics-updated/382007
- ContentsThe following sections are in this Tutorial
- Introduction
- Serial data is slow by Arduino standards
- Example 1 – Receiving single characters
- Why code is organized into functions
- Example 2 – Receiving several characters from the Serial Monitor
- Example 3 – A more complete system
- How many characters can be received?
- Things that are not used in the examples
- serialEvent()
- Clearing the input buffer
- Receiving numbers rather than text
- Example 4 – Receiving a single number from the Serial Monitor
- Example 5 – Receiving and parsing several pieces of data
- Binary data
- Example 6 – Program to receive binary data
Please note that the tutorial continues into the next 2 Posts
-
CW46 streda 15.11. 2023 IoT Prax P2 (3h)
- AGENDA :
- kratke preskusanie z temy PWM , body: MAX 5 (skratka PWM)
- namet na samostudium https://blog.wokwi.com/explore-pwm-with-logic-analyzer/
- ziaci si dopisu popis HW a SW do zositov z poslednych DU – pomoze im to v recitacii
- VYUCBA :
- kontrola zaslanych DU v podobe „recitation“ (recitacia studenta ) samostatne rozpravanie v trvani 5 minut na temu: „Popis vybraneho programu z DU“ body: MAX 5 (skratka Wokwi Rec)
- pri kazdom riadku kodu treba povedat dve veci :
- co dana struktura (prvok) programu robi z pohladu realizacie algoritmu (priklad: cyklicky opakujuci kod vykonavajuci hlavny program vid. void loop() {…. } )
- co dana struktura (prvok) programu znamena z pohladu syntaxe (priklad: toto je bezparametrova funkcia loop ktora nevracia ziadnu hodnotu vid. (void loop() { …..} alebo int )
- WOKWI EXPERIMENTY: („linearne programy bez vetvenia“)
- NAZOV PROGRAMU: DU CW41-1 Digital Read Serial, Read a switch, print the state out to the Arduino Serial Monitor. https://docs.arduino.cc/built-in-examples/basics/DigitalReadSerial
- PRIKLAD RIESENIA:
- — Adam Krnac, II.IT : https://wokwi.com/projects/378272559438530561
- — Radovan Marko, II.IT: https://wokwi.com/projects/378268723314750465
- NAZOV PROGRAMU: DU CW41-2 Analog Read Serial, Read a potentiometer, print its state out to the Arduino Serial Monitor. https://docs.arduino.cc/built-in-examples/basics/AnalogReadSerial
- PRIKLAD RIESENIA:
- — Adam Krnac, II.IT : https://wokwi.com/projects/378272567968700417
- — Radovan Marko, II.IT: https://wokwi.com/projects/378269434601699329
- NAZOV PROGRAMU: DU CW41-3 Read Analog Voltage, Reads an analog input and prints the voltage to the Serial Monitor. https://docs.arduino.cc/built-in-examples/basics/ReadAnalogVoltage
- — Adam Krnac, II.IT : https://wokwi.com/projects/378272575358017537
- — Radovan Marko, II.IT: https://wokwi.com/projects/378271231885458433
- NAZOV PROGRAMU: DU CW40-3: Analog serial data Analog serial data
- VZOROVE RIESENIE: https://wokwi.com/projects/373596556763439105
- PRILOHA: Co je recitacia
- The purpose of recitation is to help students learn how to apply the information they’ve learned in lecture. You can help by giving insights into the reasoning that you’ve used to arrive at a solution. It is important, however, for students to be actively involved in the recitation.
- Cieľom recitácie je pomôcť študentom naučiť sa aplikovať informácie, ktoré sa naučili na prednáške. Môžete im pomôcť tým, že im priblížite úvahy, ktoré ste použili, aby ste dospeli k riešeniu. Je však dôležité, aby sa študenti aktívne zapájali do recitácie.
- What is recitation in teaching?
So recitation means students quote or take their own parts of the lesson from certain books, then self-study and practice until they are ready to receive the material and remember it again. - Čo je recitácia vo vyučovaní?
Recitácia teda znamená, že študenti citujú alebo si sami preberajú časti učiva z určitých kníh, potom sa učia sami a precvičujú, kým nie sú pripravení prijať látku a znovu si ju zapamätať.
-
CW45 streda 8.11. 2023 IoT Prax P2 (3h)
- kratka „katastroficka“ pisomka na temu PWM bude repete
- praca na samostatnom projekte : LUKACKO 5b MARKO 5b MAZUCH 5b
- v timoch pracuje: KRNAC-KOJDIAK, MAZUCH-MARKO, LUKACKO-KOVAC
- samostatne pracuju: LOVCICAN (citanie analogovej hodnoty z potenciometra), MELICHER (I2C LCDdisplej), POPROCKY (TILT senzor)
- JuPa vypise DU na Edupage WORK HW ARDUINO za MAX.5 BODOV (skratka HW Arduino) vid. zapis z 18.10. –> studenti pripoja svoj ARDUINO projekt .INO alebo link na WOKWI termin 6.12.2023 (okomentovany s hlavickou)
-
CW44 streda 1.11. 2023 IoT Prax P2 (3h)
- jesenne prazdniny
-
CW43 streda 25.10. 2023 IoT Prax P2 (3h)
- AGENDA :
- ziaci si dopisu popis HW a SW do zositov z poslednych DU – pomoze im to v recitacii
- Alex poslal neskor DU – ma moznost si to opravit cez reciatcie
- VYUBA :
- 5b za HW ulohu KNAZOVIC a LOVCICAN
- MAZUCH dorobi vysielanie na seriovu linku (robi projekt preblikavajucich LED)
- VIKTOR sa pokusi dokoncit HW
-
CW42 streda 18.10. 2023 IoT Prax P2 (3h)
- AGENDA :
- chcel by som Vas poziadat aby ste od buducej hodiny IoT sedeli v triede podla zasadacieho poriadku. Zasadaci poriadok respektuje abecedne radenie mien – vid Edupage.
- zakaz hrania hier
- Povinny obsah zosita IoT – skontrolujte si ci tam mate vsetko – link na CLANOK o TOM
- priebezne vyhodnotenie simulacnych uloh DU CW40-3, DU CW41-1, DU CW41-2, DU CW41-3 – termin 20.10.2023
- VYUCBA :
- — TEORIA : Pulzne Sirkova Modulacia PWM
- PRIKLAD: 5. Projekt 3: Pulzar (Pulzujúca LED) z knihy BOZIK(2013) str.36-40 [1][1] …\Predmet_IoT_prax\MATERIALY a KNIHY\Ako naprogramovať Arduino bez predchádzajúcich znalostí.pdf
- — vysvetlujeme si odsadzovanie textu v programe
- — skusame popisat kod v programe syntakticky z hladiska syntaxe C/C++ a vyznamovo z hladiska algoritmu
- — dalsie zdroje k PWM :
- (TENTO CLANOK PREBREAME DNES ) Naučte sa signál PWM pomocou logického analyzátora Wokwi (https://blog.wokwi.com/explore-pwm-with-logic-analyzer/)
- What is a PWM signal? (https://www.circuitbread.com/ee-faq/what-is-a-pwm-signal)
- Basics of PWM (Pulse Width Modulation) (https://docs.arduino.cc/learn/microcontrollers/analog-output)
- Pulse Width Modulation (https://learn.sparkfun.com/tutorials/pulse-width-modulation/all)
- — PRAKTICKA VYUCBA: vytvorenie pracovisk a realizacia HW a SW studentmi vybranych cviceni v postredi ARDUNIO IDE, analyza jednotlivych prikazov programu
- — Boli vytvorene HW timy: tim KRNAC, MARKO, KOJDIAK, MELICHER a tim MAZUCH, KNAZOVIC, MARKO, LUKACKO
- HW ulohu za 5 BODOV dnes vyriesili KNAZOVIC ( Pulzujuca LED podla BOZIK(2013) a MARKO ( DU CW40-3: Analog serial data Analog serial data )
- — WORK HW ARDUINO za MAX.5 BODOV (skratka HW Ard)
- : JuPa zavadza HW ulohu riesenu len v skole – realizaciu naprogramovaneho ARDUINA s periferiou – treba doniest do skoly HW, v skole vytvorit program v ARDUINO IDE, „naflesovat“ program do ARDUINO a ukazat jeho funkcnost – pozaduje sa aby program nieco vypisoval na seriovu linku a student tuto komunikaciu ukazal
- HW ulohu dnes vyriesili KNAZOVIC ( Pulzujuca LED podla BOZIK(2013) ) a MARKO ( DU CW40-3: Analog serial data Analog serial data )
- — TEORIA : Pulzne Sirkova Modulacia PWM
- AGENDA :
-
CW41 streda 11.10. 2023 IoT Prax P2 (3h)
- AGENDA:
- vyhodnotenie DU CW40-3: Analog serial data Termin: streda 22.10.2023, POLNOC
- odovzdalo zatial 6 studentov – termin je polnoc
- JuPa da studentom radarovy snimac : ESP32 with RCWL-0516 Microwave Radar Proximity Sensor (Arduino IDE) ( https://randomnerdtutorials.com/esp32-rcwl-0516-arduino/ )
- VYUCBA :
- Sekvencia prikazov v programe :
- WOKWI EXPERIMENTY: („linearne programy bez vetvenia“)
- NAZOV PROGRAMU: Digital Read Serial, Read a switch, print the state out to the Arduino Serial Monitor. https://docs.arduino.cc/built-in-examples/basics/DigitalReadSerial
- NAZOV PROGRAMU: Analog Read Serial, Read a potentiometer, print its state out to the Arduino Serial Monitor. https://docs.arduino.cc/built-in-examples/basics/AnalogReadSerial
- NAZOV PROGRAMU: Read Analog Voltage, Reads an analog input and prints the voltage to the Serial Monitor. https://docs.arduino.cc/built-in-examples/basics/ReadAnalogVoltage
- WOKWI EXPERIMENTY: („linearne programy bez vetvenia“)
- Sekvencia prikazov v programe :
- PRILOHA:
- Hlavicka programu bude obsahovat komentovany blok textu (t.j. v C/C++ to bude text v /* ….. */ )
- /* MENO A PRIEZVISKO:
- DATUM:
- PREDMET: IoT
- PLATFORMA: ARDUINO – simulator Wokwi (platforma = kde resp. co vykonava program )
- NAZOV DOMACEJ ULOHY: napr.CW40-1 DU: ARDUINO program BLINK s LED-kou – simulacia vo Wokwi
- POPIS ZADANIA: napr. Program blika dvoma LED diodami – striedavo, LED su zapojene na piny c.2 a c.3
- VYSLEDOK TESTOV: simulator Wokwi ukazuje ocakavane chovanie programu (ALGORITMU)
- HISTORIA :
- — napr. tento program bol prevzaty z Internetu na linku Wokwi: https://wokwi.com/projects/375239525190710273
- — napr. autor mi nie je znamy
- */
- ZADANIE DOMACICH ULOH :
- DU CW41-1 Digital Read Serial
CO TREBA UROBIT:
— Read a switch, print the state out to the Arduino Serial Monitor
— vo Wokwi overit cinnost programu na adrese https://docs.arduino.cc/built-in-examples/basics/DigitalReadSerial
— do programu vlozit hlavicku programu a riadkove komentare
ZMYSEL CVICENIA: naucit sa prevziat poznatky z referencneho zdroja
SPOSOB ODOVZDANIA: umiestnit na DU Edupage, do zosita nakreslit schemu HW a zapisat kod SW, zosit predlozit na kontrolu
TERMIN :22.10.2023
HODNOTENIE: 5 bodov - DU CW41-2 Analog Read Serial
CO TREBA UROBIT:
— Analog Read Serial, Read a potentiometer, print its state out to the Arduino Serial Monitor.
— vo Wokwi overit cinnost programu na adrese
https://docs.arduino.cc/built-in-examples/basics/AnalogReadSerial
— do programu vlozit hlavicku programu a riadkove komentare
ZMYSEL CVICENIA: naucit sa prevziat poznatky z referencneho zdroja
SPOSOB ODOVZDANIA: umiestnit na DU Edupage, do zosita nakreslit schemu HW a zapisat kod SW, zosit predlozit na kontrolu
TERMIN :22.10.2023
HODNOTENIE: 5 bodov - DU CW41-3 Read Analog Voltage
CO TREBA UROBIT:
— Read Analog Voltage, Reads an analog input and prints the voltage to the Serial Monitor
— vo Wokwi overit cinnost programu na adrese
https://docs.arduino.cc/built-in-examples/basics/ReadAnalogVoltage
— do programu vlozit hlavicku programu a riadkove komentare
ZMYSEL CVICENIA: naucit sa prevziat poznatky z referencneho zdroja
SPOSOB ODOVZDANIA: umiestnit na DU Edupage, do zosita nakreslit schemu HW a zapisat kod SW, zosit predlozit na kontrolu
TERMIN :22.10.2023
HODNOTENIE: 5 bodov
- ZDROJE:
- [1] … \Predmet_IoT_teoria\SKEN KNIHA PSENCIKOVA 2009\PSENCIKOVA 2009 KAP.2.SEKVENCIA.PDF
- [2] … \Predmet_IoT_teoria\SKEN KNIHA PSENCIKOVA 2009\PSENCIKOVA 2009 KAP.3.VETVENIE.PDF
- [3] in Arduino IDE „built-in“ EXAMPLES : https://docs.arduino.cc/built-in-examples/
- [4] ARDUINO: popis class SERIAL https://www.arduino.cc/reference/en/language/functions/communication/serial/
CW40 streda 4.10. 2023 IoT Prax P2 (3h)
- AGENDA:
- — prihlasujeme do uctu Wokwi
- — dakujem Vikrtorovi a Radovi za prinesenie HW na hodinu –> nech to prinesu aj na buduce skusime na ich HW domace ulohy
- VYUCBA:
- — odskusali sme program , ktory generuje na seriovu linku ASCII tabulku : https://docs.arduino.cc/built-in-examples/communication/ASCIITable
- — dnes sa podrobne venujeme zavedeniu pojmu seriova linka a integracia seriovej linky do programu na ARDUINO platforme
- — nas referencny projekt pre simulator Wokwi pre seriiovu linku je : https://wokwi.com/projects/373596556763439105
- v projekte sa riadi potenciometrom jas blikajucej LED-ky
- analogove hodnoty sa vypisuju na seriovu linku
- nedokoncili sme vyklad zdrojoveho kodu tohoto programu –> musime sa vratit a najprv prejst jednoduchsie programy (projekty )z knihy BOZIK(2013)
- POZNAMKA:
- JuPa nevedel na hodine ako zapnut simulator seriovej linky : simulator seriovej linky sa da vidiet v okne simulatora: tri bodky volba Debug (BETA)
- JuPa odporuca studovat podrobnejsi popis pojmu seriova linka v ARDUINO [1] – [4]
- [1] kap.5 …\Predmet_IoT_prax\MATERIALY a KNIHY\Průvodce světem ARDUINA.pdf
- [2]“Digital Read Serial“ https://docs.arduino.cc/built-in-examples/basics/DigitalReadSerial
- [3]“Serial Input Basics – updated“ https://forum.arduino.cc/t/serial-input-basics-updated/382007
- [4]“Serial“ https://www.arduino.cc/reference/en/language/functions/communication/serial/
- [5] „Projekt s 3 LED riadenymi 3 tlacitkami“ (j etam vetvenie a cyklus – narocne) https://wokwi.com/projects/375785908541732865
- ZADANIA DOMACICH ULOH:
- ULOHA ZRUSENA
DU CW40-1: Projekt 1: „Hello world“ . Termin: streda 11.10.2023vytvorte projekt v simulatore podla projektu c.1 z knihy BOZIK(2013) [1] str. 29-33nakreslite v simulatore HW a doplnte aj SWoverte cinnost programuprojekt ulozte – ziskate tak link na clodSposob odovzdania domacej ulohy : cez EduPage uviest link na Vas projekt WokwiZDROJ: [1] …\Predmet_IoT_prax\MATERIALY a KNIHY\Ako naprogramovať Arduino bez predchádzajúcich znalostí.pdf
- ULOHA ZRUSENA
DU CW40-2: Projekt 2: Neblikám pre srandu, volám S.O.S Termin: streda 11.10.2023vytvorte projekt v simulatore podla projektu c.1 z knihy BOZIK(2013) [1] str. 34-40nakreslite v simulatore HW a doplnte aj SWoverte cinnost programuprojekt ulozte – ziskate tak link na clodSposob odovzdania domacej ulohy : cez EduPage uviest link na Vas projekt WokwiZDROJ: [1] …\Predmet_IoT_prax\MATERIALY a KNIHY\Ako naprogramovať Arduino bez predchádzajúcich znalostí.pdf
- DU CW40-3: Analog serial data Termin: streda 11.10.2023
- vytvorte projekt v simulatore podla projektu [1]
- nakreslite v simulatore HW a doplnte aj SW
- overte cinnost programu
- doplnte hlavicku a komentar podla popisu na stranke [1],vid zapis 5. CW40 Pi, 6.10.2023 II.IT · Internet veci(1h), cast: ZADANIE DOMACEJ ULOHY :DU-CW41-1 : dve striedavo blikajuce LED-ky, komentovany projekt vo WOKWI
- projekt ulozte – ziskate tak link na cloud
- nakreslite HW, napiste SW (vratane hlavicky a komenarov) do zosita na tento predmet – kontrola bude na hodine – nezabudnite si zosit
- Sposob odovzdania domacej ulohy : cez EduPage uviest link na Vas projekt Wokwi a napisat text „uloha je aj v zosite“
- ZDROJ:
- [1] https://wokwi.com/projects/373596556763439105
- [2] https://www.drpancik.sk/vyucba-akademicky-rok-2022-23/spsjm-skolsky-rok-2023-24/internet-veci-iot-teoria-ii-it-1h-tyz-sr-23-24/
- PLAN NABUDUCE :
- — kontrola zaslanych DU
- — kontrola zositov
- — podrobna analyza kodu prikladov z domacich uloh CW40 – zapis analyzy do zositov sposob grafickeho zapisu PSENCIKOVA
- — ukazka HW ARDUINO (JuPa, Viktor, Rado)
- POZNAMKY:
- vyborny zdroj je ARDUINO reference k „Serial“ :
- https://www.arduino.cc/reference/en/language/functions/communication/serial/su tam vyborne priklady, napr. :
- https://docs.arduino.cc/built-in-examples/communication/ASCIITable
- https://docs.arduino.cc/built-in-examples/communication/Dimmer
- https://docs.arduino.cc/built-in-examples/communication/ReadASCIIString
- …..dalsie …..
CW39 streda 27.9. 2023 IoT Prax P2 (3h)
- venujeme sa nakupu hardveru pre domace experimentovanie:
- vyber suciastok na zakupenie bu mohol byt podriadeny experimentom v knihe BOZIK(2013) vid.[1] a suciastkam uvedenym v dokumenatcii k Wokwi simulatoru
- napriklad:
- ARDUINO UNO https://techfun.sk/produkt/arduino-uno-r3-precizny-klon/
- breadboard https://techfun.sk/produkt/nepajive-pole-400-bodov/
- LED
- odpory
- vodice Male – Male
- tlacitko
- potenciometer
- LCD displej (I2C, parallel)
- klavesnica membranova
- bzuciak
- [1] …\Predmet_IoT_prax\MATERIALY a KNIHY\Ako naprogramovať Arduino bez predchádzajúcich znalostí.pdf
- parcujeme na zadanych domacich ulohach
ZADANIE DOMACICH ULOH :
- DU CW38-3: do projektu dvojledkovej policajnej hukacky doplnit LCD 1602 displej a vypise nan („Svieti CERVENA“ alebo „Svieti MODRA„) ∙ 5B ∙ Body
- Odovzdanie domacej ulohy sa predlzuje na 4.10.2023
- Radovan Marko poslal projekt ako prvy – dakujem a ocenujem (https://wokwi.com/projects/376372158715727873)doplnit / opravit v projekte – citajte to aj ostatni studenti :— zkraslit HW tahanie ciar – odpory nech su nie prekrizovane s vodicmi— vyuzit funkciu na konfiguraciu, mazanie displeja a nastavenie polohy kurzora lcd.begin(16, 2); lcd.clear(); lcd.setCursor(16, 1);— (citaj clanok: „Liquid Crystal Displays (LCD) with Arduino“ vid link https://docs.arduino.cc/learn/electronics/lcd-displays— dorobit diakritiku vid clanok „wokwi-lcd1602 Reference“ na konci je cast „User defined characters“ , vid. link https://docs.wokwi.com/parts/wokwi-lcd1602Sposob odovzdania:nazov projektu CW38-3 – uviest link na projekt Wokwiviac citajte na BLOG-u predmetu: https://www.drpancik.sk/vyucba-akademicky-rok-2022-23/spsjm-skolsky-rok-2023-24/internet-veci-prax-iotp-skupina-p2-sr-23-24/ podpoplnam dalsie poznatky
- DU CW38-1: precitat knihu BOZIK(2013), strany 1-29 (uvod, teoria Arduino, ….) 5B ∙ Body
- Odovzdanie domacej ulohy sa predlzuje na 4.10.2023
- neposielat nic na EduPage – prebehne ustne preskusanie
- citaj https://www.drpancik.sk/vyucba-akademicky-rok-2022-23/spsjm-skolsky-rok-2023-24/internet-veci-prax-iotp-skupina-p2-sr-23-24/
Merge email nedela 24.9.2023
Dobry den,
chcel by som Vas poprosit aby ste si na nase hodiny (t.j. IoT Prax, Iot Teoria) nosili zosity a nieco na pisanie a kreslenie obrazkov (bolo by super keby to bola obycajna tuzka a guma).
Zosity mozu mat Vami zvolený formát (A4 a A5).
Zosit bude nazvany ako IoT a bude na nom Vase meno.
Nesmie byt pouzity na iný účel (napr. aj na matematiku ci hranie piskvoriek).
Dovody:
1. Vami podpisany a pokresleny zosit IoT je dokaz ze na mojich hodinach aj niečo robite
2. V praxi sa stale vela kreslí rukou ("sketchuje") - ci uz schemy hardveru alebo navrhy mechaniky (krabicky pristrojov). Rukou sa kreslia sa aj navrhy softveru (algoritmy) ci navrhy architektury systemu (napr. IoT).Tieto rukou nakreslene nacrty sa vzajomne zdielaju medzi clenmi tymu. Mojou úlohou je Vas toto kreslenie náčrtov a pri nom pouzite znacky naucit.
Zavery:
1. Zosity (ich existenciu na hodine ) budem priebezne kontrolovat.
2. Kazdy stvrtrok vyhodnotim ich obsah ale aj formu - zapamatajte si ze jasne formulacie a kresby hovoria o jasnej hlave, ktora rozumie veci. Nepodceňte to.
Zdravi
JuPa
PS:
link na web stranku nasho predmetu IoT je :
https://www.drpancik.sk/vyucba-akademicky-rok-2022-23/spsjm-skolsky-rok-2023-24/internet-veci-iot-teoria-ii-it-1h-tyz-sr-23-24/
a IoT prax je
https://www.drpancik.sk/vyucba-akademicky-rok-2022-23/spsjm-skolsky-rok-2023-24/internet-veci-prax-iotp-skupina-p2-sr-23-24/
CW38 streda 20.9. 2023 IoT Prax P2 (3h)
- — prechadzame knihu BOZIK(2013)
- — Domaca uloha: precitat knihu BOZIK(2013), strany 1-29 (uvod, teoria Arduino, ….)
- — spolocne prechadzame projekt 1 (Projekt P CW38-1) : „Hello World “ (kniha BOZIK(2013), str.29-33)
- hardware: kazdy student vo Wokwi vytvori schemu a prenesie program z knihy do Wokwi
- software:
- podrobne hovorime o deklaracii datoveho typu „int“ a jeho rozsah stanovujeme pomoocu programatorskej kalkulacky vo Windows (16 bit)
- „On the Arduino Uno (and other ATmega based boards) an int stores a 16-bit (2-byte) value. This yields a range of -32,768 to 32,767 (minimum value of -2^15 and a maximum value of (2^15) – 1). „– vid link https://www.arduino.cc/reference/en/language/variables/data-types/int/
- hovorime o nazvoch premennej, ktore su CASE SENSITIVE (citlive na velkost pismen – CAPS LOCK)
- na hodine doplname hw schemu o druhu ledku a robime z toho policajnu svetelnu sirenu tak ze do programu doplname dalsie priklady
- — Domaca uloha DU CW38-1: precitat knihu BOZIK(2013), strany 1-29 (uvod, teoria Arduino, ….) – neposielat nic na EduPage – prebehne ustne preskusanie
- — Domaca uloha DU CW38-2: pomocou programatorskej kalkualcky odvodit ciselny rozsah datovy typ float. Citaj text: „Datatype for floating-point numbers, a number that has a decimal point. Floating-point numbers are often used to approximate analog and continuous values because they have greater resolution than integers. Floating-point numbers can be as large as 3.4028235E+38 and as low as -3.4028235E+38. They are stored as 32 bits (4 bytes) of information.“ – link: https://www.arduino.cc/reference/en/language/variables/data-types/float/. – Neposielat nic na EduPage – prebehne ustne preskusanie
- — Domaca uloha DU CW38-3: do projektu dvojledkovej policajnej hukacky doplnit LCD 1602 displej (projekt P CW36) a vypis nan („Svieti CERVENA“ alebo „Svieti MODRA„)
- Radovan Marko poslal projekt ako prvy – dakujem a ocenujem (https://wokwi.com/projects/376372158715727873)
- doplnit / opravit v projekte – citajte to aj ostatni studenti :
- — zkraslit HW tahanie ciar – odpory nech su nie prekrizovane s vodicmi
- — vyuzit funkciu na konfiguraciu, mazanie displeja a nastavenie polohy kurzora lcd.begin(16, 2); lcd.clear(); lcd.setCursor(16, 1);
- — (citaj clanok: „Liquid Crystal Displays (LCD) with Arduino“ vid link https://docs.arduino.cc/learn/electronics/lcd-displays
- — dorobit diakritiku vid clanok „wokwi-lcd1602 Reference“ na konci je cast „User defined characters“ , vid. link https://docs.wokwi.com/parts/wokwi-lcd1602
- Sposob odovzdania: nazov projektu CW38-3 – uviest link na projekt Wokwi
- — INE : hovorime o tom ake informacne zdroje na samostudium programovania pouzivaju IT profesionali (90 000 respondentov):
- 41% ma Bc vzdelanie https://survey.stackoverflow.co/2023/#developer-profile-education
- 80% pouziva (aj) videa na studium programovania https://survey.stackoverflow.co/2023/#developer-profile-learning-to-code
[1] …\Predmet_IoT_prax\MATERIALY a KNIHY\Ako naprogramovať Arduino bez predchádzajúcich znalostí.pdf
************ ZACINA NOVA SKUPINA P2***********************
Meranie sily so snímačom sily v mostíkovom zapojení (digitálna váha)
16 januára, 2024 | Posted by in Hlavná stránka - (Komentáre vypnuté na Meranie sily so snímačom sily v mostíkovom zapojení (digitálna váha))| STREDNÁ PRIEMYSELNÁ ŠKOLA J. MURGAŠA BANSKÁ BYSTRICA Elektrotechnické laboratóriá | ||||||||||||||
| Odbor: | Dátum merania: | |||||||||||||
| Trieda: | Dátum odovzdania: | |||||||||||||
| Skupina: | Vyučujúci: doc.RNDr.Juraj Pančík, CSc. | |||||||||||||
| Laboratórium: | Klasifikácia: | Známka: | Podpis: | |||||||||||
| Meno a priezvisko žiaka: | ||||||||||||||
| LABORATÓRNE CVIČENIE č. 33 Meranie sily so snímačom sily v mostíkovom zapojení (digitálna váha) | ||||||||||||||
| OBSAH: | ||||||||||||||
| 1. Názov cvičenia a jednotlivých úloh. | ||||||||||||||
| 2. Súpis prístrojov a pomôcok pri meraní. | ||||||||||||||
| 3. Popis meracej metódy a schéma merania. | ||||||||||||||
| 4. Tabuľky a grafy nameraných a vypočítaných hodnôt. | ||||||||||||||
| 5. Vyhodnotenie merania. | ||||||||||||||
| 1. NÁZOV CVIČENIA: | Meranie sily so snímačom sily v mostíkovom zapojení (digitálna váha) | |||||||||||||
| Úlohy a) | Oboznámte sa s hardvérovým a softvérovým riešenia meracieho prípravku | |||||||||||||
| b) | Vykonajte merania hmotnosti pri rôznych hodnotách referenčných závaží pre mechaniku digitálnej váhy, ktorá používa odporové snímače sily v mostíkovom zapojení. Použite referenčnú digitálnu váhu. | |||||||||||||
| c) | Kalibračným stanovte počiatočný offset „Offset“ [ADU] a prevodovú konštantu digitálnej váhy vyjadrenú v jednotkách [ADU/g] | |||||||||||||
| d) | Vyjadrite linearitu modelu prevodovej charakteristiky digitálnej váhy (závislosť výstupnej veličiny signálu zo snímača sily [ADU] na vstupnej veličine (hmotnosť, [g] ) ) | |||||||||||||
| e) | ||||||||||||||
| 2.SÚPIS POUŽITÝCH PRÍSTROJOV | ||||||||||||||
| Prístroj – pomôcka | Typové označenie a rozsah | Výrobca | Inventárne číslo | |||||||||||
| 1. | MP c.33 Merací prípravok pre meranie sily (digitálna váha) | |||||||||||||
| 2. | Kuchynská digitálna váha (max.5 kg, presnosť ±1g) | |||||||||||||
| 3. | Sada závaží z laboratória fyziky | |||||||||||||
| Nedostatky pri hodnotení (zapíše vedúci merania učiteľ): | ||||||||||||||
3. Popis meracej metódy a schéma merania
Princíp merania sily. Ak sa pás vodivého kovu natiahne, stane sa tenším a dlhším, pričom obe zmeny vedú k zvýšeniu elektrického odporu od konca ku koncu. Naopak, ak sa pás vodivého kovu vystaví tlakovej sile (bez vybočenia), rozšíri sa a skráti. Ak sa tieto napätia udržiavajú v medziach pružnosti kovového pásika (aby sa pásik trvalo nedeformoval), pásik sa môže použiť ako merací prvok fyzikálnej sily, pričom veľkosť pôsobiacej sily sa odvodí z merania jeho odporu. Takéto zariadenie sa nazýva tenzometer. Tenzometre sa často používajú v strojárskom výskume a vývoji na meranie napätí, ktoré vznikajú v strojových zariadeniach. Jednou z oblastí použitia je testovanie komponentov lietadiel, kde sa na meranie napätia používajú malé tenzometrické pásy prilepené na konštrukčné prvky, spojovacie zariadenia a akékoľvek iné kritické komponenty draku lietadla. Väčšina tenzometrov je menšia ako poštová známka a vyzerá približne ako na obrázku Obrázok 1.
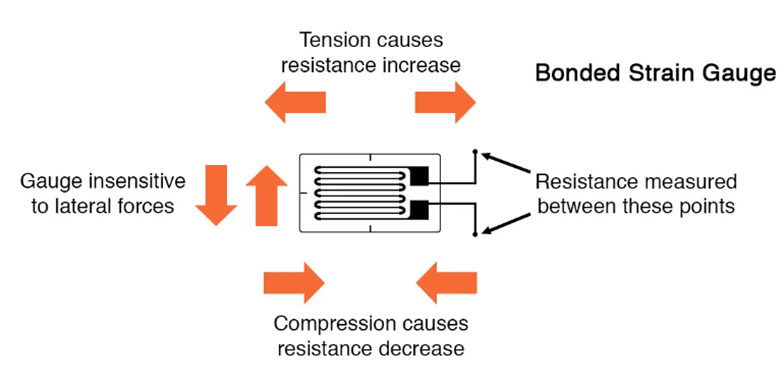
Obrázok 1 Principiálna schéma snímača sily – tenzometra [1]
Odolnosť tenzometra. Typické odpory tenzometrov sa pohybujú od 30 Ω do 3 kΩ (bez napätia). Tento odpor sa môže zmeniť len o zlomok percenta pre celý rozsah sily meradla vzhľadom na obmedzenia vyplývajúce z elastických limitov materiálu meradla a skúšobnej vzorky. Sily dostatočne veľké na vyvolanie väčších zmien odporu by trvalo deformovali skúšobnú vzorku a/alebo samotné vodiče meradla, čím by sa meradlo ako meracie zariadenie zničilo. Preto, aby sme mohli tenzometer používať ako praktický prístroj, musíme merať veľmi malé zmeny odporu s vysokou presnosťou.
Mostíkový merací obvod
Takáto vysoká presnosť si vyžaduje mostíkový merací obvod. Na rozdiel od Wheatstonovho mostíka, ktorý využíva detektor nulovej rovnováhy a ľudskú obsluhu na udržiavanie rovnovážneho stavu, obvod tenzometrického mostíka indikuje meranú deformáciu stupňom nerovnováhy a na presné meranie tejto nerovnováhy využíva presný voltmeter v strede mostíka, viď. Obrázok 2
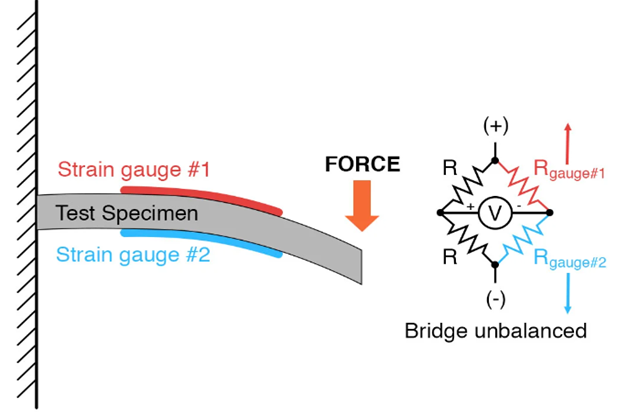
Obrázok 2 Rozváženie tzv. „half bridge“ tenzometra pod vplyvom záťaže (váženej hmotnosti v prípade digitálnych váh) [1]
Meracia metóda
Nami použitá meracia metóda vychádza z konštrukcie digitálnej váhy kde sa použil tzv „full bridge“ t.j. štvorica tenzometrov, viď. Obrázok 3.
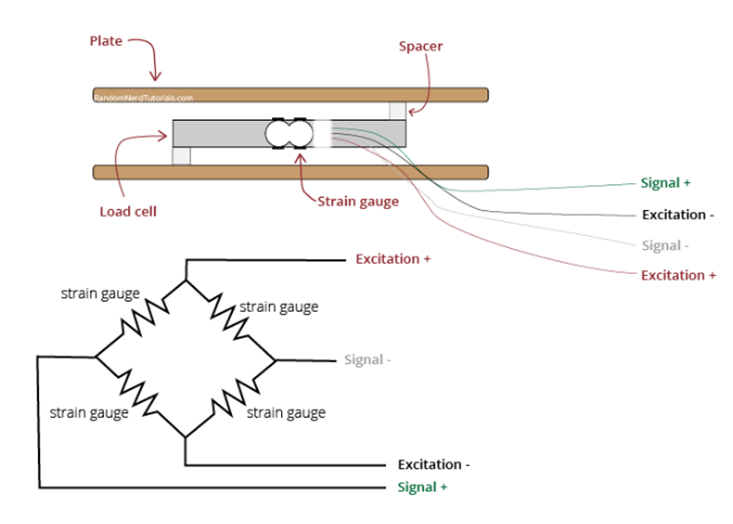
Obrázok 3 Mechanika digitálnej váhy a lokalizácia tenzometrov na hliníkovom nosníku s dvoma veľkými otvormi [2].
Merací systém
Merací systém pozostáva okrem spomínaných mechanických častí digitálnej váhy (hliníkový bloček s nalepenými tenzometrami v konfigurácii „full bridge“, polykarbonátové platne (horná a dolná)). Ďalším prvkom je zákaznícky obvod HX711 spoločnosti Avia [3], ktorý slúži ako „front end“ obvod, programovateľný zosilňovač, 24 bitový Sigma Delta ADC (analógovo digitálny prevodník) a komunikačno sériový interface (rozhranie) pre vyhodnocovací jednodoskový počítač typu ARDUINo UNO Rev.3, viď. Obrázok 4. Program v ARDUINO zabezpečil výpis získaných digitálnych údajov z HX711 tzv. 24 bit RAW dát (v jednotkách ADU) na sériovú linku čítanú terminálovým programom v počítači. Program v ARDUINO dokázal vypočítať priemer z 10 hodnôt.
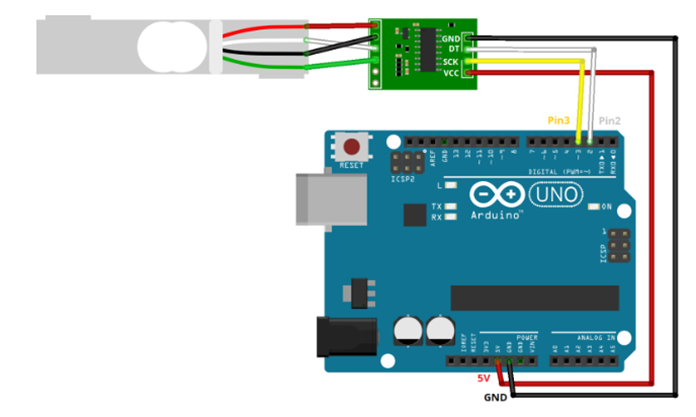
Obrázok 4 Bloková schéma meracieho systému na meranie sily v zostave digitálnej váhy [2]
4. Tabuľky a grafy nameraných a vypočítaných hodnôt.
Najprv sme vykonali merania hmotnosti pri rôznych hodnotách referenčných závaží pre mechaniku digitálnej váhy, ktorá používa odporové snímače sily v mostíkovom zapojení. Použili sme referenčnú kuchynskú digitálnu váhu a zistili sme maximálne 1g odchýlku od deklarovaných hmotností použitých závaží. Vstupná tabuľka č.1 prezentuje výsledky váženia pre jednotlivé hmotnosti kalibračných závaží (viď. stĺpec „Hmotnosť kalibračných závaží [g]“ ). V stĺpci „Signál z ADC [ADU]“ sú zaznamenané údaje z 24 bit Sigma delta ADC. Následne po tomto meraní sme vykonali kalibráciu digitálnej váhy. Kalibračným postupom sme stanovili počiatočný offset „Offset“ [ADU] (hodnota 153 647 ADU) a stanovili sme prevodovú konštantu digitálnej váhy (= 757 [ADU/g]) vyjadrenú v jednotkách [ADU/g] nasledovným výpočtom :
Kalibračný faktor [ADU/g] =
(Signál z ADC [ADU] pre 100 g závažie – OFFSET [ADU]) / 100 g (referenčná záťaž) (1)
Tabuľka 1 Výsledky váženia pre jednotlivé hmotnosti kalibračných závaží
| n | Hmotnosť kalibračných závaží [g] | Signál z ADC [ADU] | Kalibračný faktor [ADU/g] |
| 1 | 0 | 153647 | |
| 2 | 100 | 229330 | 757 |
| 3 | 200 | 304864 | 755 |
| 4 | 300 | 379454 | 746 |
| 5 | 400 | 454723 | 753 |
| 11 | 970 | 888471 | |
| 12 | 1070 | 964282 | 758 |
| 13 | 1170 | 1039856 | 756 |
| 14 | 1270 | 1114524 | 747 |
| 15 | 1370 | 1189804 | 753 |
Grafom sme vyjadrili sme linearitu modelu prevodovej charakteristiky digitálnej váhy (závislosť výstupnej veličiny signálu zo snímača sily [ADU] na vstupnej veličine (hmotnosť, [g] ) ) – rovnica lineárnej závislosti (y = 756,83x + 153647) bola vypočítaná EXCELOM vrátane linearizačného koeficientu R² = 1. Táto hodnota koeficientu hovorí o vysokom stupni lineárnej odozvy snímačov sily v našej mechanickej zostave digitálnej váhy.
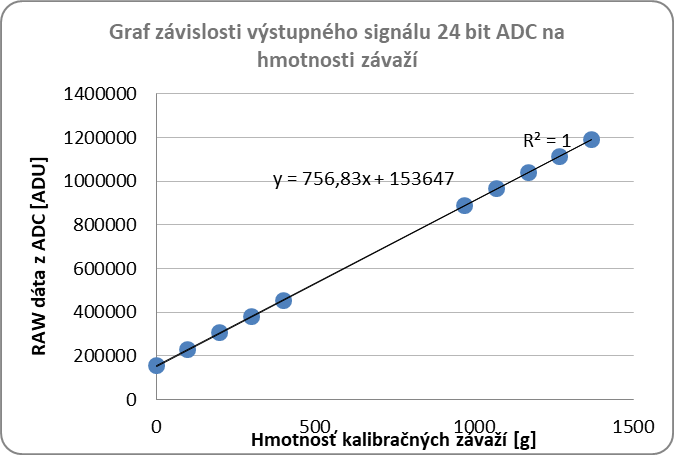
Obrazok 5 Linearitu modelu prevodovej charakteristiky digitálnej váhy
5. Vyhodnotenie merania.
Oboznámili sa s hardvérovým a softvérovým riešením meracieho prípravku – zaregistrovali sme veľký počet digitalizačných úrovní N použitého ADC (N=24) čo zrejme súvisí s potrebou získania vysokého odstupu signál šum v systémovom riešení spracovania signálu z tenzometrov. Vykonali sme merania hmotnosti pri rôznych hodnotách referenčných závaží pre mechaniku digitálnej váhy a pri tomto sme použite referenčnú digitálnu váhu s presnosťou ±1g. Samotné nami použité závažia vykazovali taktiež tento rozptyl hodnôt hmotností ±1g. Kalibračným postupom s hmotnosťou kalibračného závažia 100 g sme stanovili počiatočný offset „Offset“ [ADU] a prevodovú konštantu digitálnej váhy 757 vyjadrenú v jednotkách [ADU/g]. Kalibračné závažie by malo byť na hodnote 80% maximálnej povolenej záťaže hliníkového nosníka (v našom prípade 3kg) t.j. 2,4kg – my sme použili nám dostupné 100g závažie. Pomocou grafu na Obrazok 5 sme vyjadrili linearitu modelu prevodovej charakteristiky digitálnej váhy (závislosť výstupnej veličiny signálu zo snímača sily [ADU] na vstupnej veličine (hmotnosť, [g])) pomocou rovnica lineárnej závislosti (y = 756,83x + 153647) bola vypočítaná EXCELOM vrátane linearizačného koeficientu R² = 1. Táto hodnota koeficientu hovorí o vysokom stupni lineárnej odozvy snímačov sily v našej mechanickej zostave digitálnej váhy.
6. Informačné zdroje
[1] https://www.allaboutcircuits.com/textbook/direct-current/chpt-9/strain-gauges/
[2] https://randomnerdtutorials.com/arduino-load-cell-hx711/#more-110379
[3] https://community.infineon.com/gfawx74859/attachments/gfawx74859/CodeExamples/546/7/HX711_v0_0_B.pdf
TMMP_podrobny_popis_semestralni_prace
22 decembra, 2023 | Posted by in Hlavná stránka - (Komentáre vypnuté na TMMP_podrobny_popis_semestralni_prace)Hodnocení předmětu TMM:
- max. 30 bodů teoreticka zkouska test on line doma – uzavřené otázky se správnou 1 odpovědí a který je připraven z materiálů v adresáři :
- …IS AMBIS Stud.materiály PBP_TMMP Zima 2023\1_PREDNASKY TMM.ZIP\1_PREDNASKY TMM\OTÁZKY KE ZKOUŠCE\
- max. 70 bodů semestrální práce : Analýza a návrh IS „Sběrna elektrospotřebičů“ – TERMIN ODEVZDANI SEMESTRALNI PRACE : odevzdat elektronicky den pred termínem zkoušky.
POŽADAVKY NA SEMESTRÁLNÍ PRÁCI :
- POSTUP :
- 1. KROK : po napsání semestrální práce (antiplagiátorská kontrola v IS AMBIS, Uschovna –> kontrola „vejce k vejci“ ) :
- Prosím, ve smyslu směrnice AMBIS [1] zjistěte shodu obsahu a poslete mi procentuální číslo shody (vygenerujte screenshot „odležený“ výsledek kontroly textu z Úschovny — Vejde k vejci)
- System vypočítá shodu ze souborů na Internetu až za nějaký čas
- Proto nereagujte hned na to, když Vám systém napíše shodu 0% se soubory v databázi AMBIS (tj. ještě ne se soubory na Internetu).
- Poznámka: ve smyslu směrnice AMBIS [1] je povolena shoda maximálně 10 %.
- 2. KROK : semestrální práce se zasílá doc.Pancikovi na email:
- na email juraj.pancik(at)ambis.cz
- předmět emailu: TMMP_Prijimeni_Jmeno
- v příloze k názvu: TMMP_Prijimeni_Jmeno.docx nebo TMMP_Prijimeni_Jmeno.pdf
- UML diagramy v souborech (.drawio a .PDF) budou ZAZIPOVANE v jednom souboru s nazvem TMMP_Prijimeni_Jmeno.ZIP
- Kazdy UML diagram ma svuj soubor – zasila se format .drawio a jeho export do .pdf
- do emailu vložit screenshot „odležený“ výsledek kontroly textu z Úschovny — Vejde k vejci (antiplagiátorská kontrola)
- 3. KROK : doc. Pančík emailem potvrdí příjem semestrální práce, akceptuje ji (nebo neakceptuje) a poděkuje za vykonání kontroly zhody
- student se může sa zúčastnit teoretické skúšky
Povinná struktura práce ve WORDu :
— POZNAMKY:
— k obsahu podkapitoly cti prislusny zapis z vyuky na www stranke predmetu
— k forme-cti pokyny AMBIS k zaverecnym pracim (jsou to PDF soubory ulozene v studijnich materialech k nasemu predmetu a nahrane na IS AMBIS) :
…\VP-R-01_Zaverecna_prace.pdf
…\Příloha č. 1 ke směrnici rektorky VP-R-01 Závěrečná práce.pdf
…\VP-R-11_Metodika_hodnoceni_kvality_bc__a_dipl__praci.pdf
…\VP-R-12-Zamezeni_plagiatorstvi_a_obsahove_shody.pdf
TITULKA titulka zaverecne prace AMBIS – vid. pokyny k zaverecnym pracim v AMBIS-u
OBSAH automaticky vygenerovany obsah ve Wordu
UVOD 0.5 strany – tu rozpesat popisovany informacni system „Sberna elektrospotrebicu“
1. POZADAVKY NA INFORMACNI SYSTEM 1.0-1.5 strany – TABULKA, funkcni a nefunkcni pozadavky – — — tabulkova forma pozadavku, identifikace cislami – vid. vzor. POLAKOVA
2. PROCESNI MODEL INFORMACNIHO SYSTEMU 1,0-1.5 strany, OBRAZEK, TEXTOVY POPIS
— JuPa odporuca prevziat do semestralnej prace nakreslene BPMN obrazky (KANISOVA, obr.3-16) od studentov a prekreslit ich pomocou Drawio (…\3_STUDENTSKE PRACE\3_STUD_WORK_DIAGRAM BPMN KANISOVA\)
3. USE CASES, 1,0-1.5 strany, OBRAZEK, TEXTOVY POPIS
— vid kniha KANISOVA Obr 4.2 str.38 – nezapomenout take uvest 1-3 scenare pripadu pouziti vid str. 39/40 a uvesttake alternativny scenar pripadu pouziti
4. MODEL TRID OBJEKTU, 1.0-1.5 strany , OBRAZEK, TEXTOVY POPIS – staci ilustrativni obrazek z ineho informacniho systemu – vid priklady v knize KANISOVA napr. Obr.7.1 na str.80, alebo obr.7.3 alebo Obr 7.4
5. SEKVENCNI DIAGRAM, 1,0-2,0 strany, OBRAZEK, TEXTOVY POPIS
— staci prekreslit sekvencni diagramu spolu se scenarem pripadu pouziti (tento tam musi byt) – vid. obr.6.3 str. 70 kniha KANISOVA
6. STAVOVY DIAGRAM, 1.0-1.5 strany, OBRAZEK, TEXTOVY POPIS
— vhodny by bol napr. stavovy diagram obr.8-10 str.92 v knihe KANISOVA a prekreslit ho
7. ACTIVITY DIAGRAM, 1.0-1.5 strany, OBRAZEK, TEXTOVY POPIS
— vhodny by bolo napr. vybrat a prekreslit jeden alebo viac activity diagramov z obr.9.4 az 9.7 str.98 – 101 kniha KANISOVA
ZAVER
LITERATURA – automaticky generuje WORD
SEZNAM OBRAZKU – automaticky generuje WORD
ELMt : Otazky na pisomku IV.C a IV.D
11 decembra, 2023 | Posted by in Hlavná stránka - (Komentáre vypnuté na ELMt : Otazky na pisomku IV.C a IV.D)Pisomka ELMt. utorok dna 12.12.2023
- Čo je náhodná chyba ?
- Čo je trieda presnosti (TP)
- Čo je magnetoelektrický jednosmerný prístroj, nakreslite jeho principiálnu schému.
- Aká je schéma zapojenia bočníka k ampérmetru a aký je vzťah pre výpočet odporu bočníka ?
- Ako zväčšíte näpaťový rozsah voltmetra pomocou predradníku (nakreslite obrázok) a uveďte vzťah pre jeho výpočet ?
Pisomka ELMt. pondelok dna 11.12.2023
- Čo je systematická chyba ?
- Čo je trieda presnosti (TP) ?
- Čo je magnetoelektrický jednosmerný prístroj, nakreslite jeho principiálnu schému.
- Aká je schéma zapojenia bočníka k ampérmetru a aký je vzťah pre výpočet odporu bočníka ?
- Ako zväčšíte näpaťový rozsah voltmetra pomocou predradníku (nakreslite obrázok) a uveďte vzťah pre jeho výpočet ?
Copyright © 2010 All rights reserved.
Designed by 